机电传动控制第一周学习笔记:
1 这一周主要讲述了概论和机电传动控制系统动力学基础两个章节内容。
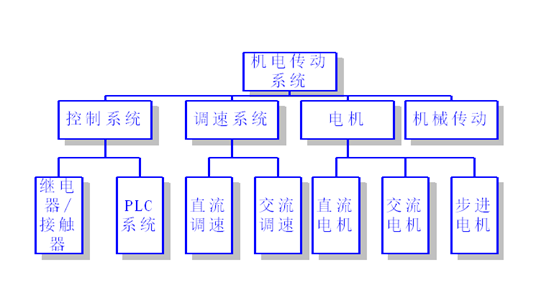
2 绪论中说明了《机电传动控制》课程主要内容为下图所示:
3机电传动控制系统动力学基础章节主要内容分为:
(1)a:机电传动系统的运动方程式
b:多轴传动系统中转矩和惯量折算的基本原则与方法
c:典型生产机械的负载特性
d:机械传动系统稳定运行条件及稳定性分析
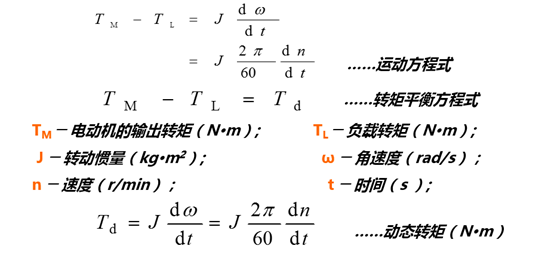
首先以单轴传动系统为例,讲述了单轴传动系统的运动方程式为:
对于转矩转速正负号的理解:首先假定一个方向为转速的正方向,则输出转矩正方向与转速正方向相同,负载转矩正方向与转速正方向相反。然后根据实际运动过程中转速,输出转矩,负载转矩的方向与规定的正方向对比,若相同,则对应物理量取正号,反之取负号,代入运动方程式中。
而在实际的生产过程中有很多是多轴传动系统,为了将多轴传动系统与单轴传动系统统一起来,于是就需要将转矩和惯量进行折算,以实现多轴传动系统与单轴传动系统的等效。其中折算的原则是:静态时,折算前后系统总的传输功率和动能不变。(这个原则的依据是为了系统等效前后能量保持守恒吗?)
(2)生产机械的机械特性:同一轴上,负载转矩和转速之间的函数关系。典型的机械特性有:1 恒转矩型机械特性,又包括反抗转矩和位能转矩两种。
反抗转矩:大小恒定不变,作用方向恒与速度n方向相反
位能转矩:大小和方向恒定不变
2离心式通风型机械特性:负载转矩的大小与转速n的平方成正比

3 直线型机械特性:

4恒功率型机械特性:
(3)机电系统稳定运行的含义与条件:
1 系统应能以一定速度匀速运行(输出转矩与负载转矩相等)
2 系统受某种外部干扰时运行速度发生变化时,应保证在干扰消除后系统能恢复到原来的运行速度。(干扰使速度下降时,应有(干扰影响后)输出转矩大于(干扰消除后)负载转矩,反之亦然)
4 难点:对于根据图来判断是否是稳定平衡点仍有点绕。