1 编译选项
编译选项有:
Translate:Translate the current active file. 翻译当前改动的文件,用来检查语法错误,不生成目标文件。
Build:Build target files. 编译目标文件,只对更改的源文件进行一个编译,同时生成连接可执行文件。如果是第一次编译,会对所有的文件进行一个编译。
Rebuild:Rebuild all target files. 对多有的文件进行一个编译。
Batch Build:Perform a batch build. 进行批量编译。

2 添加.c与.h文件
2.1 创建文件夹
在工程文件夹中新建一个文件User,然后在User文件中新建Src(存放.c文件)和Inc(存放.h文件)两个文件夹。

2.2 创建源文件
new两个空白文件,一个保存在Src文件夹中,为.c文件;另一个保存在Inc文件夹中,为.h文件。
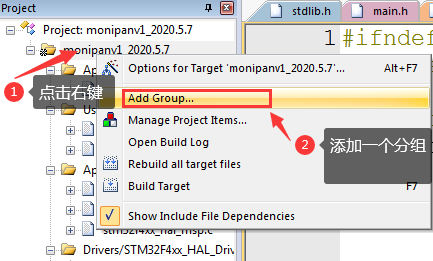
2.3 添加分组
在工程中添加一个分组,并对分组进行命名。
2.4 在分组中添加文件
将新建的.c文件添加至分组中。

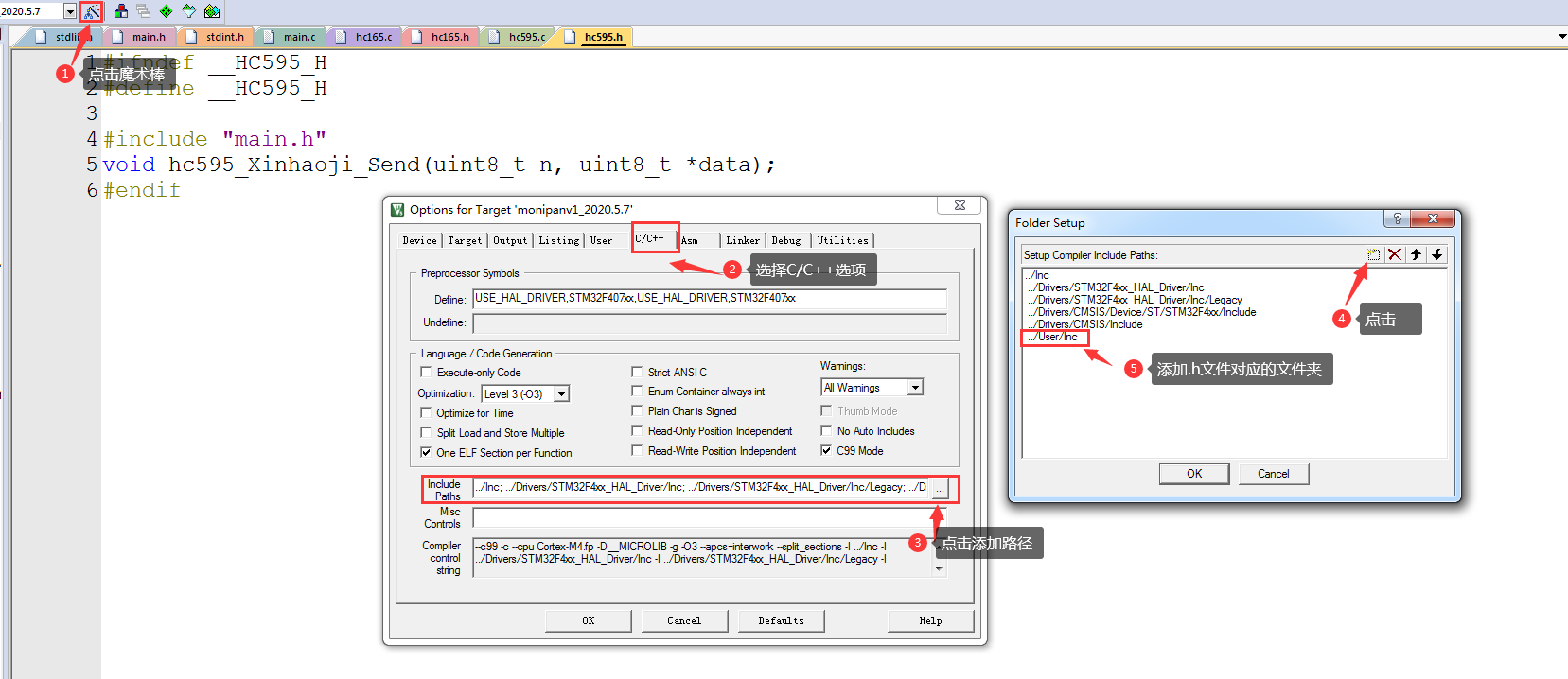
2.5 添加.h文件路径
3 #ifndef #define #endif
创建一个头文件后,要在.h文件中添加如下几条语句:
#ifndef __XXX_H
#define __XXX_H
#endif
上面的XXX是指该头文件的名字,一般用大写字母表示。例如delay.h,XXX就是DELAY。
其实这就是一个判断语句:
判断条件为是否定义了__XXX_H;
执行范围在#ifndef __XXX_H至#endif中间(如果满足if条件,就执行这个范围里的语句);
#endif就是一个if判断结束标志。
加这几条判断语句的目的:
可以避免重复编译,例如:
a.h中包含了delay.h;
b.h中也包含了delay.h;
最后main.h中包含a.h与b.h;
那么在编译的过程中,只有a.h中的delay.h会被编译,后面b.h中delay不会被编译。
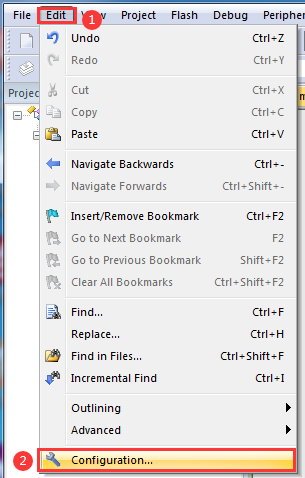
4 注释显示乱码的解决方法

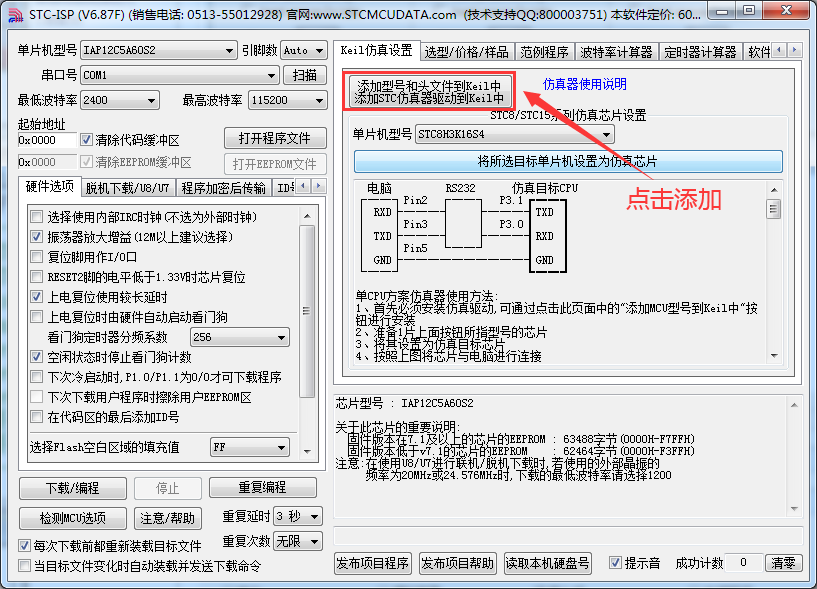
5 在keil中添加STC芯片包的方法
使用STC-ISP软件,如下图所示。
/*---------------------------------------------------------------------*//* --- STC MCU Limited ------------------------------------------------*//* --- STC15F4K60S4 系列 AD转换查询方式举例----------------------------*//* --- Mobile: (86)13922805190 ----------------------------------------*//* --- Fax: 86-0513-55012956,55012947,55012969 ------------------------*//* --- Tel: 86-0513-55012928,55012929,55012966-------------------------*//* --- Web: www.STCMCU.com --------------------------------------------*//* --- Web: www.GXWMCU.com --------------------------------------------*//* 如果要在程序中使用此代码,请在程序中注明使用了STC的资料及程序 *//* 如果要在文章中应用此代码,请在文章中注明使用了STC的资料及程序 *//*---------------------------------------------------------------------*/
//本示例在Keil开发环境下请选择Intel的8058芯片型号进行编译//若无特别说明,工作频率一般为11.0592MHz
#include "reg51.h"#include "intrins.h"
#define FOSC 11059200L#define BAUD 115200
typedef unsigned char BYTE;typedef unsigned int WORD;
#define URMD 0 //0:使用定时器2作为波特率发生器 //1:使用定时器1的模式0(16位自动重载模式)作为波特率发生器 //2:使用定时器1的模式2(8位自动重载模式)作为波特率发生器
sfr T2H = 0xd6; //定时器2高8位sfr T2L = 0xd7; //定时器2低8位
sfr P1M1 = 0x91; //PxM1.n,PxM0.n =00--->Standard, 01--->push-pullsfr P1M0 = 0x92; // =10--->pure input, 11--->open drainsfr P0M1 = 0x93;sfr P0M0 = 0x94;sfr P2M1 = 0x95;sfr P2M0 = 0x96;sfr P3M1 = 0xB1;sfr P3M0 = 0xB2;sfr P4M1 = 0xB3;sfr P4M0 = 0xB4;sfr P5M1 = 0xC9;sfr P5M0 = 0xCA;sfr P6M1 = 0xCB;sfr P6M0 = 0xCC;sfr P7M1 = 0xE1;sfr P7M0 = 0xE2;
sfr AUXR = 0x8e; //辅助寄存器
sfr ADC_CONTR = 0xBC; //ADC控制寄存器sfr ADC_RES = 0xBD; //ADC高8位结果sfr ADC_LOW2 = 0xBE; //ADC低2位结果sfr P1ASF = 0x9D; //P1口第2功能控制寄存器
#define ADC_POWER 0x80 //ADC电源控制位#define ADC_FLAG 0x10 //ADC完成标志#define ADC_START 0x08 //ADC起始控制位#define ADC_SPEEDLL 0x00 //540个时钟#define ADC_SPEEDL 0x20 //360个时钟#define ADC_SPEEDH 0x40 //180个时钟#define ADC_SPEEDHH 0x60 //90个时钟
void InitUart();void InitADC();void SendData(BYTE dat);BYTE GetADCResult(BYTE ch);void Delay(WORD n);void ShowResult(BYTE ch);
void main(){ P0M0 = 0x00; P0M1 = 0x00; P1M0 = 0x00; P1M1 = 0x00; P2M0 = 0x00; P2M1 = 0x00; P3M0 = 0x00; P3M1 = 0x00; P4M0 = 0x00; P4M1 = 0x00; P5M0 = 0x00; P5M1 = 0x00; P6M0 = 0x00; P6M1 = 0x00; P7M0 = 0x00; P7M1 = 0x00;
InitUart(); //初始化串口 InitADC(); //初始化ADC while (1) { ShowResult(0); //显示通道0 ShowResult(1); //显示通道1 ShowResult(2); //显示通道2 ShowResult(3); //显示通道3 ShowResult(4); //显示通道4 ShowResult(5); //显示通道5 ShowResult(6); //显示通道6 ShowResult(7); //显示通道7 }}
/*----------------------------发送ADC结果到PC----------------------------*/void ShowResult(BYTE ch){ SendData(ch); //显示通道号 SendData(GetADCResult(ch)); //显示ADC高8位结果
// SendData(ADC_LOW2); //显示低2位结果}
/*----------------------------读取ADC结果----------------------------*/BYTE GetADCResult(BYTE ch){ ADC_CONTR = ADC_POWER | ADC_SPEEDLL | ch | ADC_START; _nop_(); //等待4个NOP _nop_(); _nop_(); _nop_(); while (!(ADC_CONTR & ADC_FLAG));//等待ADC转换完成 ADC_CONTR &= ~ADC_FLAG; //Close ADC
return ADC_RES; //返回ADC结果}
/*----------------------------初始化串口----------------------------*/void InitUart(){ SCON = 0x5a; //设置串口为8位可变波特率#if URMD == 0 T2L = (65536 - (FOSC/4/BAUD)); T2H = (65536 - (FOSC/4/BAUD)) >> 8; AUXR = 0x14; //T2为1T模式, 并启动定时器2 AUXR |= 0x01; //选择定时器2为串口1的波特率发生器#elif URMD == 1 AUXR = 0x40; //定时器1为1T模式 TMOD = 0x00; //定时器1为模式0(16位自动重载) TL1 = (65536 - (FOSC/4/BAUD)); TH1 = (65536 - (FOSC/4/BAUD)) >> 8; TR1 = 1; //定时器1开始启动#else TMOD = 0x20; //设置定时器1为8位自动重装载模式 AUXR = 0x40; //定时器1为1T模式 TH1 = TL1 = (256 - (FOSC/32/BAUD)); TR1 = 1;#endif}
/*----------------------------初始化ADC----------------------------*/void InitADC(){ P1ASF = 0xff; //设置P1口为AD口 ADC_RES = 0; //清除结果寄存器 ADC_CONTR = ADC_POWER | ADC_SPEEDLL; Delay(2); //ADC上电并延时}
/*----------------------------发送串口数据----------------------------*/void SendData(BYTE dat){ while (!TI); //等待前一个数据发送完成 TI = 0; //清除发送标志 SBUF = dat; //发送当前数据}
/*----------------------------软件延时----------------------------*/void Delay(WORD n){ WORD x;
while (n--) { x = 5000; while (x--); }}