先上自动控制原理上面的定义:
当控制系统的幅频特性下降到比零频率幅值低3dB时,所对应的频率为带宽频率,简称带宽。
系统的带宽反应了系统响应的快速性,也反映了对输入信号的复现能力。带宽大,系统的响应越快咯,但是带宽过宽,那么现实世界中的噪声会引入系统,造成不利影响。
这么说也许过于抽象,不知诸位看客是否想过为什么奈奎斯特稳定判据和对数稳定判据是研究单环系统的开环传递函数的特性呢?研究开环系统的幅频特性为什么是有必要的呢?
因为开环传函影响的是系统的反馈特性!
因为开环传函影响的是系统的反馈特性!
因为开环传函影响的是系统的反馈特性!
重要的事情就不免俗地说三遍啦。
对于正弦信号而言,开环传递函数的幅频特性实际上反映的是反馈回来的信号的放大倍数(也可能是缩小)和相角延迟。这个和系统的稳定性有着密切的关系。如果反馈回来的信号为-180°,并且增益也比较大(大于等于1),那么系统就自然不会稳定。然而在实际系统中,由于功率(能量)的限制,噪声的影响,自激振荡这种典型的不稳定状态就很好解释了。请见下面的例子。
>> fw = tf(1 , [1 , 0]); >> fd = fw ; >> sys = feedback(fw , fd ); >> impulse(sys)

结果如上图所示,系统的响应为以截止频率振荡的正弦波,因为存在脉冲输入能量,才能够使系统产生输出。在实际物理电路系统中,存在电源和噪声,在这种正反馈机制下,很容易就产生了自激振荡,而又受制于实际功率和电压幅值的影响,系统的输出不可能为无穷大,从而可以用于固定频率等幅振荡信号的产生。
再来简单定性分析一下二阶系统的响应特性:
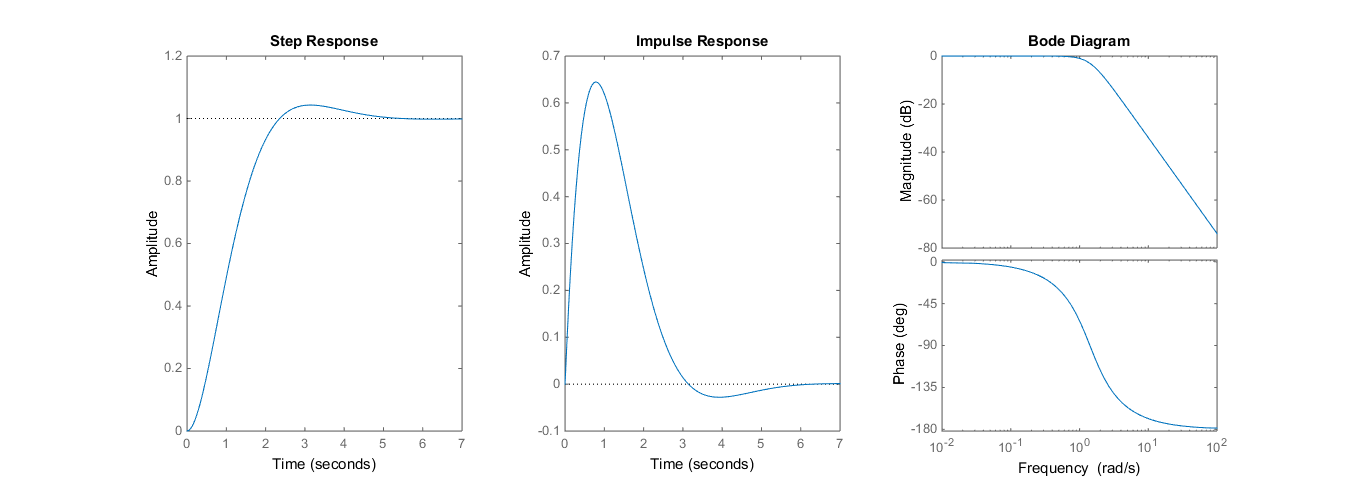
系统:2/(s2+2s+2)——注意到这里分子为2,为了保证闭环增益相同嘛。
该系统存在两个辐角各位135°和225°的极点,相当于在系统的快速性和响应振荡性两个性质之间做了一定的折衷考虑,所以虽然存在超调,但是稳定的速度也比较快:
系统:1/(s2+0.1s+1)
该系统的两个极点的复数分量相对于实部分量大得多,所以振荡比较厉害。

系统:1/(s2+1)
该系统只有两个相同的极点,所以不存在振荡,慢慢地趋近稳态值。
说到这里就不得不提阻尼比这个概念了,我猜这个概念的实际意义就是稳态分量相比于振荡分量的一个参考比,且阻尼比大于等于1时基本上就没有振荡分量的事儿了。当然这只是定性分析。
注:以上伯德图是闭环系统的哦,不是系统的开环幅频特性,我比较懒,就没改了。