概
一种较为复杂normalizing flow.
主要内容
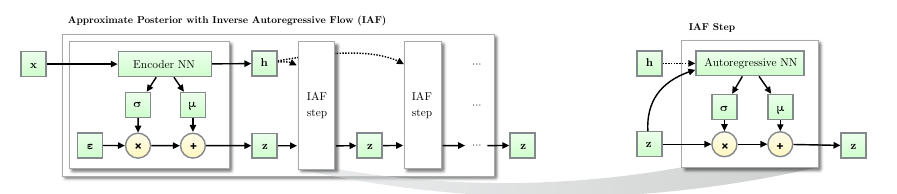
IAF的流程是这样的:
- 由encoder 得到(mu, sigma, h), 采样(epsilon), 则
[z_0 = mu_0 + sigma_0 odot epsilon;
]
- 由自回归模型得到(mu_1, sigma_1), 则
[z_1 = mu_1 + sigma_1 odot z_{0};
]
- 依次类推:
[z_t = mu_t + sigma_t odot z_{t-1};
]
自回归模型的特点就是:
[hat{v} = f(v), quad f: mathbb{R}^D
ightarrow mathbb{R}^D, \
]
( abla_v f)是一个对角线元素为0的下三角矩阵.
我们来看( abla_{z_{t-1}}z_{t}),
[
abla z_t =
abla mu_t + mathrm{diag}(z_{t-1})
abla sigma_t + mathrm{diag}(sigma_t).
]
显然, ( abla_{z_{t-1}} z_t)也是一个对角线元素为0的下三角矩阵, 且
[mathrm{det}
abla z_t = mathrm{det} : mathrm{diag}(sigma_t)= prod_{i=1}^D (sigma_t)_i.
]
这个计算方式就相当简单了.
总结一下, 最后的
[log q(z_T|x) = -sum_{i=1}^D( frac{1}{2} epsilon_i^2 + frac{1}{2}log (2pi) + sum_{t=0}^T log sigma_{t,i}).
]