注意:针对不同的Ubuntu发行版安装不同的ROS发行版,具体的对应关系见中文官方 wiki。
安装:
中文ros wiki安装过程
重要:rosdep init 错误的解决方法
一些注意事项:
- 安装ros-melodic-desktop-full时有可能会出现安装不全的情况,可以多执行几次安装命令。
- rosdep init时可能会提示rosdep未安装,按照说明直接安装即可。
- 简单查阅了一些资料,发现ros对python2.7的支持程度最高,所以为了保险,就别往python3上折腾了。
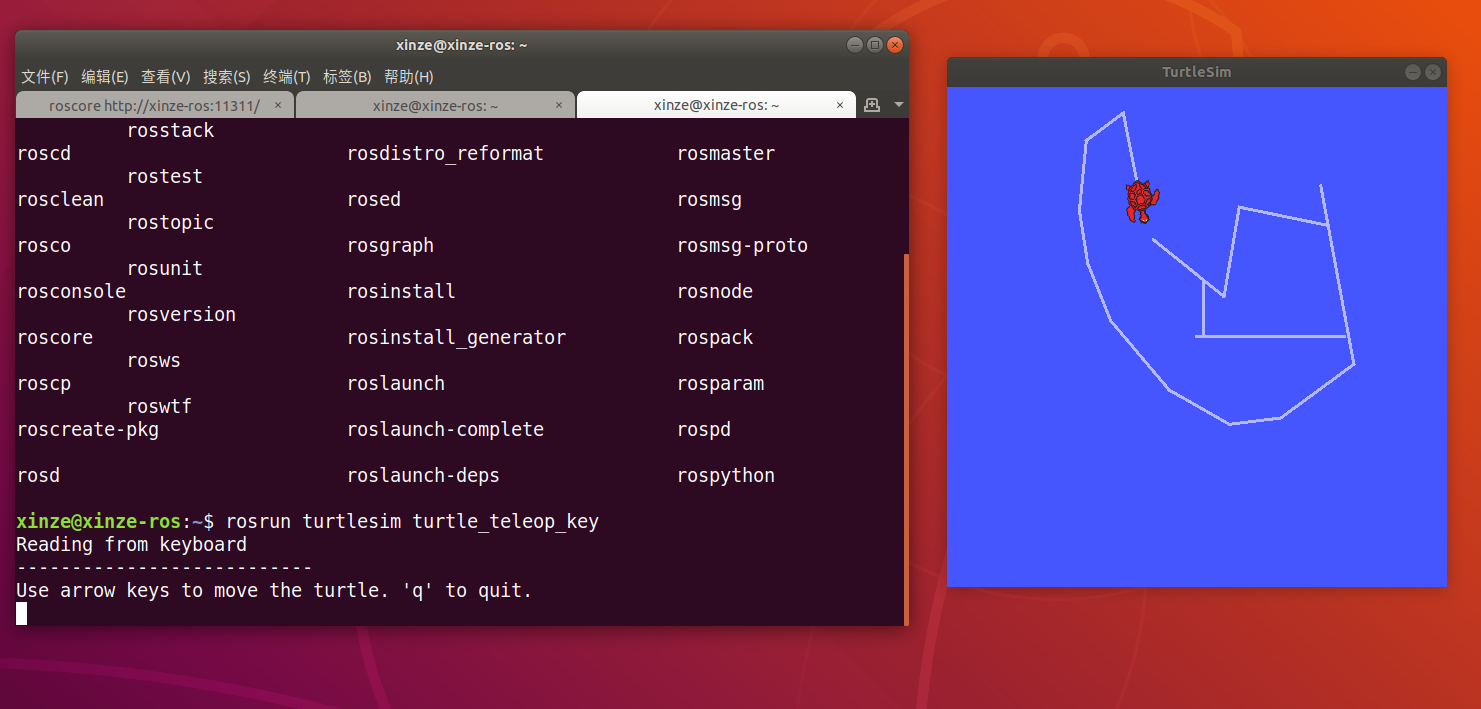
小海龟测试:
打开三个终端分别执行:
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
之后就可以用键盘上的上下左右操作小红乌龟了!