以下转载自安富莱电子: http://forum.armfly.com/forum.php
摘自:https://www.cnblogs.com/yangguang-it/p/7149048.html
本章节为大家介绍 FreeRTOS 的调试方法,这里的调试方法主要是教会大家如何获取任务的执行情况,通过获取的任务信息,可以进一步的配置和优化工程,这种方法非常实用,建议初学者必须掌握。
串口打印调试说明
很多时候,我们需要了解任务的执行状态,任务栈的使用情况以及各个任务的 CPU 使用率,这时就
需要用到官方提供的两个函数 vTaskList 和 vTaskGetRunTimeStats。用户就可以通过这两个函数获得任
务的执行情况。
获取了任务执行情况后,可以通过串口将其打印出来,当然,也可以通过任何其它方式将其显示出来。
本教程配套的例子统一采用串口打印的方式显示任务的执行情况。另外有一点要特别注意,这种调试方式
仅限测试目的,实际项目中不要使用,这种测试方式比较影响系统实时性。
为了获取 FreeRTOS 的任务信息,需要创建一个定时器,这个定时器的时间基准精度要高于系统时钟
节拍,这样得到的任务信息才准确。这里提供的函数仅用于测试目的,切不可将其用于实际项目,原因有两点:
1. FreeRTOS 的系统内核没有对总的计数时间做溢出保护。
2. 定时器中断是 50us 进入一次,比较影响系统性能。
这里使用的是 32 位变量来保存 50us 一次的计数值,最大支持计数时间:2^32 * 50us / 3600s =
59.6 分钟。 运行时间超过了 59.6 分钟将不准确。
具体在 FreeRTOS 的工程中如何做才可以实现任务信息获取呢?
使能相关宏定义
需要在 FreeRTOSConfig.h 文件中使能如下宏定义:

/***freertosconfig.h***/ extern volatile uint32_t ulHighFrequencyTimerTicks ; /* Run time and task stats gathering related definitions. */ #define configUSE_TRACE_FACILITY 1 #define configGENERATE_RUN_TIME_STATS 1 #define configUSE_STATS_FORMATTING_FUNCTIONS 1 #define portCONFIGURE_TIMER_FOR_RUN_TIME_STATS() (ulHighFrequencyTimerTicks = 0ul) #define portGET_RUN_TIME_COUNTER_VALUE() ulHighFrequencyTimerTicks
之前的博客:

使能了宏定义之后,必要完成portCONFIGURE_TIMER_FOR_RUN_TIME_STATS()和portGET_RUN_TIME_COUNTER_VALUE()的定义,那么我们究竟应该如何定义并使用它们呢?
freertos官方网站给了提示(点击这里查看更多):

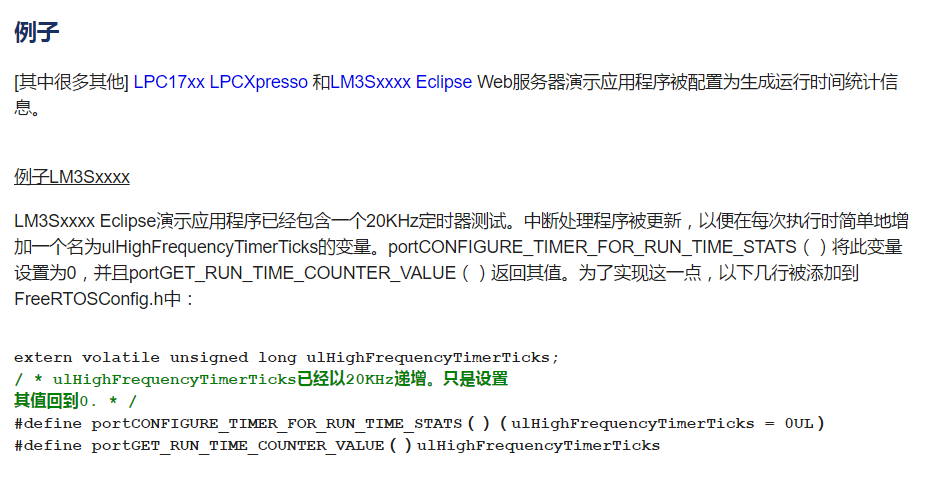
本次实验采用上面的做法,下面还有一个例子,但是没有上面好用:

现在我使用第一种方式,STM32F429,TIM6基本定时器,产生一个50us周期的中断,进一次中断,计数器的值加1:

由于在进入
/* 第三步:启动FreeRTOS,开始多任务调度,启动成功则不返回 */
vTaskStartScheduler();(在这个函数中调用了portCONFIGURE_TIMER_FOR_RUN_TIME_STATS() )
这个函数之前,定时器计数已经执行计数功能很多次了,为了保证我们的基石相对准确,我们在启动freertos的API函数中将其置零,这也就是为什么那个宏#define portCONFIGURE_TIMER_FOR_RUN_TIME_STATS() 要这样操作这个计数器ulHighFrequencyTimerTicks=0UL;这样从任务开启时,计数器从零开始计数,而portGET_RUN_TIME_COUNTER_VALUE()是为了得到最后的计数值,可以是一个函数,返回之前用户自定义的计数器的值,也可以直接把那个计数器的值进行宏替换,在uxTaskGetSystemState()函数调用形式如下:

可以知道,我们只是需要这个计数器的值作为右值最后打印显示。(一个比较好的参考,点击这里)-(stack overflow参考)-(博客参考)。
有了前面的铺垫之后,再来说说我们的验证试验:
功能描述:按下K1按键,打印出任务信息,函数如下:
static void vTaskWork(void *pvParameters)
{
uint8_t pcWriteBuffer[500];
while(1)
{
if (key1_flag==1)
{
key1_flag=0;
/* K1键按下 打印任务执行情况 */
printf("=======================================================
");
printf("任务名 任务状态 优先级 剩余栈 任务序号
");
vTaskList((char *)&pcWriteBuffer);
printf("%s
", pcWriteBuffer);
printf("
任务名 运行计数 使用率
");
vTaskGetRunTimeStats((char *)&pcWriteBuffer);
printf("%s
", pcWriteBuffer);
/* 其他的键值不处理 */
}
vTaskDelay(20);
}
}
任务一,执行打印,任务二,LED闪烁,任务三,蜂鸣器
static void AppTaskCreate(void)
{
xTaskCreate(vTaskWork, /* 任务函数 */
"vTaskWork", /* 任务名 */
512, /* 任务栈大小,单位word,也就是4字节 */
NULL, /* 任务参数 */
1, /* 任务优先级*/
&xHandleTaskWork ); /* 任务句柄 */
xTaskCreate( vTaskLed1, /* 任务函数 */
"vTaskLed1", /* 任务名 */
512, /* 任务栈大小,单位word,也就是4字节 */
NULL, /* 任务参数 */
2, /* 任务优先级*/
&xHandleTaskLED1); /* 任务句柄 */
xTaskCreate( vTaskBeep, /* 任务函数 */
"vTaskBeep", /* 任务名 */
512, /* 任务栈大小,单位word,也就是4字节 */
NULL, /* 任务参数 */
3, /* 任务优先级*/
&xHandleTaskBeep ); /* 任务句柄 */
}
void vTaskLed1(void *pvParameters)
{
/* 任务都是一个无限,不能返回 */
while(1)
{
LED3_ON;
/* 阻塞延时,单位ms */
vTaskDelay( 500 );
LED3_OFF;
vTaskDelay( 500 );
}
}
void vTaskBeep(void *pvParameters)
{
/* 任务都是一个无限循环,不能返回 */
while(1)
{
BEEP_ON;
/* 阻塞延时,单位ms */
vTaskDelay( 20 );
BEEP_OFF;
vTaskDelay( 500 );
}
}
基本硬件初始化:
static void BSP_Init(void)
{
/*
* STM32中断优先级分组为4,即4bit都用来表示抢占优先级,范围为:0~15
* 优先级分组只需要分组一次即可,以后如果有其他的任务需要用到中断,
* 都统一用这个优先级分组,千万不要再分组,切忌。
*/
NVIC_PriorityGroupConfig( NVIC_PriorityGroup_4 );
/* LED 初始化 */
LED_GPIO_Config();
/*串口初始化*/
Debug_USART_Config();
/*按键初始化*/
EXTI_Key_Config();
/*定时器6初始化*/
TIMx_Configuration();
/* 蜂鸣器初始化 */
Beep_GPIO_Config();
}
关于裸机部分的外设初始化配置不再赘述。这样,下载程序之后,LED灯闪烁并且蜂鸣器鸣叫,在按下k1按键时,串口输出如下:

有了这个可以知道,我们512字的任务栈空间实在有点浪费,最后的剩余栈单位也是字。
最后,关于vTaskList((char *)&pcWriteBuffer);vTaskGetRunTimeStats((char *)&pcWriteBuffer);这个缓冲区的大小,官网说的,一个任务,大约40个字节足够,我们取50字节,所以定义的缓冲区大小uint8_t pcWriteBuffer[500];可以足够打印10个任务状态。