这篇博客只是为了自己记录,思路比较跳跃。
Policy Gradients
不估计局面的价值,转而预测选取每个动作的概率。因为某些游戏中我们可能会需要在相同的状态下做出随机行为,比如说某些资源有限的游戏,我们不可能一直在某一个地方一直获取资源。
更新函数是( heta_{t+1}= heta_t + alpha cfrac{partial J}{partial heta}),其中(J( heta))是对当前参数产生的策略的评价,越高越好。
(J( heta))中,( heta)的影响来自于两方面,一是在特定状态下的行为选择,二是这个策略到每个状态的概率。行为选择的偏导比较好考虑,然而行为造成的“某些高价值的状态没有到达”这件事情的偏导就没有那么形象了。
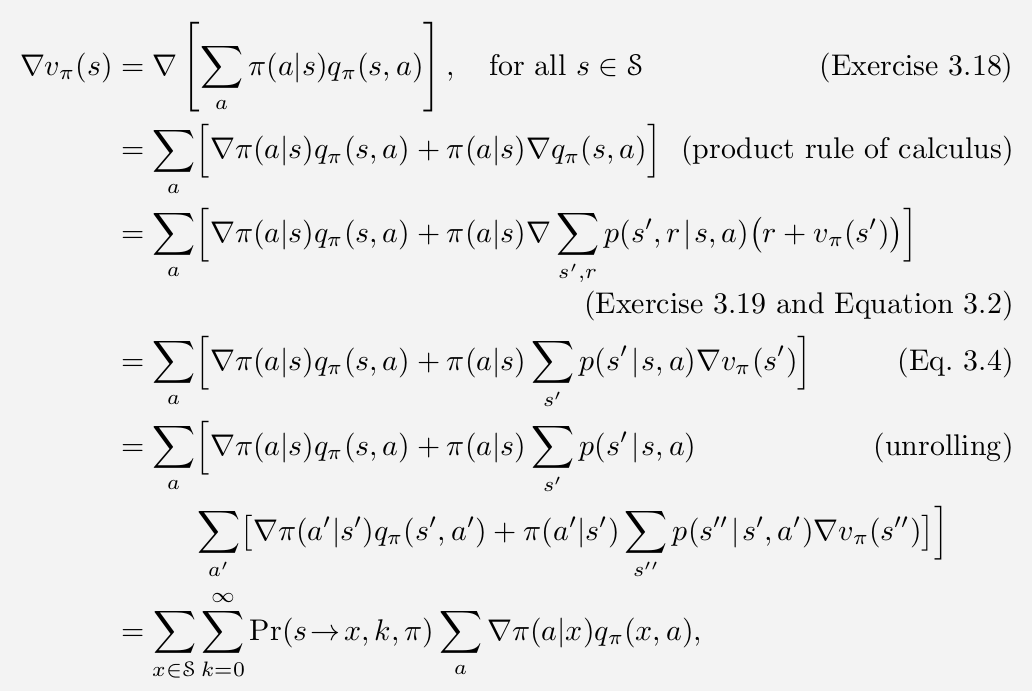
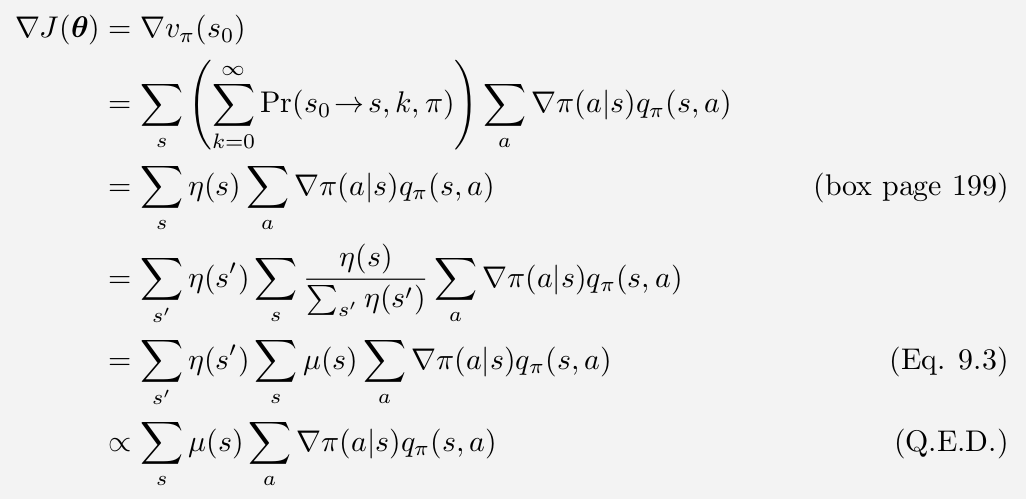
我们把策略对可能到达状态的影响浓缩在了一个(mu (x))里,表示在该策略下到达(x)的概率。
最后关于这个梯度的计算,我自己有一些想法:
- 一是通过蒙特卡洛估计,即使状态量巨大或者无限,状态的密度分布依然会把我们带到密度大的状态,我们的(q)值也是策略下的(q)值,没有统计到的密度小的状态价值再高也会被密度冲淡,影响不大。
- 二是通过Q-learning or DQN来估计(q)值,两个算法相互迭代。