一、主要内容
特征点法的问题
关键点的提取和描述子的构造很耗时。
忽略了特征点以外的信息。
在没有纹理或者纹理重复的地方,难以准确匹配。
解决思路
光流法。保留关键点,但不构造描述子。通过光流法跟踪关键点来回避构造描述子和匹配的开销。之后仍使用pnp,ICP等方法。
使用直接法计算关键点在下一帧的位置。这种方法仍需特征点,但同光流法一样,回避了描述子和匹配。
根据灰度信息使用直接法。这种方式不用关键点和描述子。
直接法的特点
只通过像素灰度估计相机运动,不构造特征点。
通过最小化光度误差进行优化,而非最小化重投影误差。
可构建稠密地图。
需要比较强的假设条件:灰度不变假设、窗口假设。
避免了特征计算时间和特征缺失的情况。
二、光流法
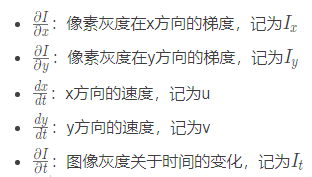
光流法描述了像素在图像中的运动。分为稀疏光流和稠密光流。这里介绍的LK是稀疏光流的代表方法。该方法以灰度不变为假设,经过变换得到某个像素点


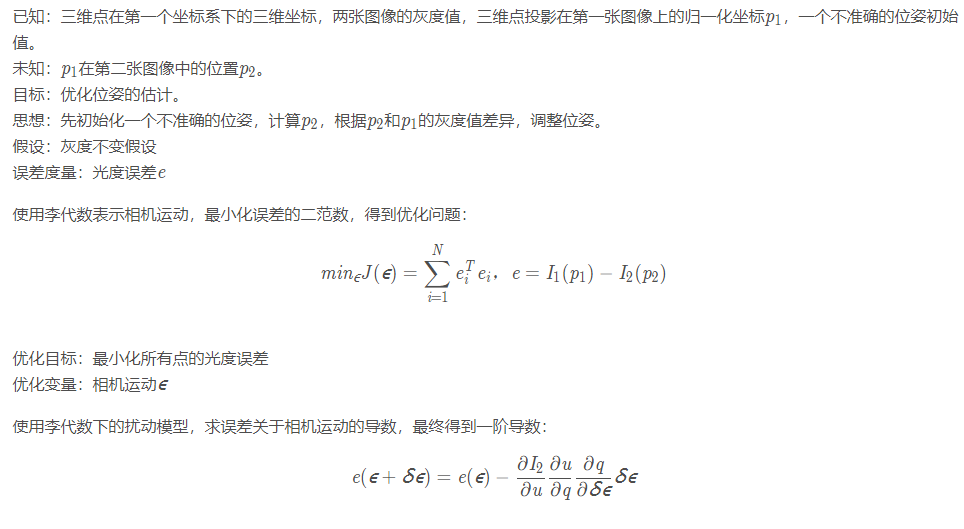
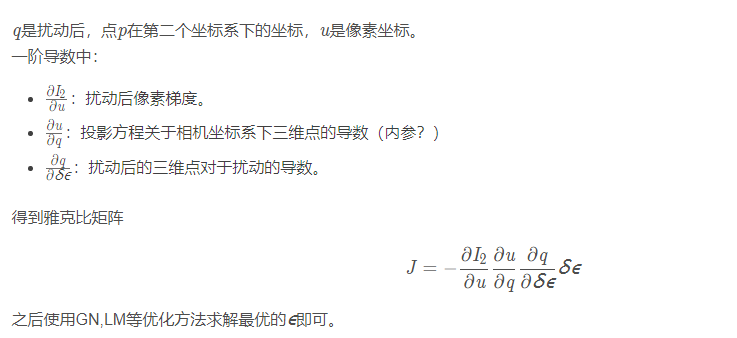
三、直接法
实践:光流法:
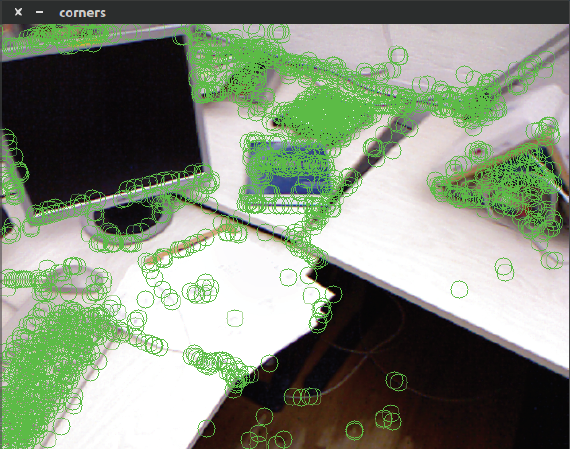
t=0;

t=10;

t=20;
由于时间关系,以上内容部分转载,十月份以后转为原创。
————————————————
版权声明:本文为CSDN博主「KylinQAQ」的原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/pikachu_777/article/details/83686661