1、定义
用顶点表示活动,用有向边<Vi, Vj>表示活动间的优先关系。
Vi必须先于活动Vj进行。
这种有向图叫做顶点表示活动的AOV网络(Activity On Vertices)


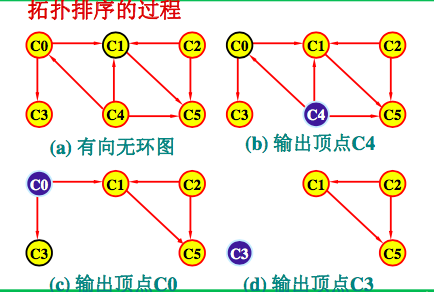
2、拓扑排序
拓扑序列:即将各个顶点(代表各个活动)排列成一个线性有序的序列,使得所有弧尾结点排在弧头结点的前面。
这种构造AOV网络全部顶点的拓扑有序序列的运算叫做拓扑排序。
如果通过拓扑排序能将AOV网络的所有顶点都排入一个拓扑有序的序列中,则一定没有有向环。
上图的拓扑排序为:
C1,C8,C2,C3,C5,C9,C4,C7,C6
拓扑排序方法:
(1)输入AOV网络。令n为顶点个数;
(2)在AOV网络中选一个没有直接前驱的顶点,并输出之;
(3)从图中删去该顶点,同时删去所有它发出的有向边;
(4)重复以上(2)(3)步,直到
全部顶点均已输出,拓扑有序序列形成,拓扑排序完成;
或
图中还有未输出的顶点,但已跳出处理循环。说明图中还剩下一些顶点,它们都有直接前驱,这是网络中必有环。

如果图采用邻接表储存,则在邻接表中增设一个数组count[],记录各顶点入度。入度为0的顶点即无前驱顶点。
在输入数据前,顶点表data[]和入度数组count[]全部初始化。
在输入数据时,每输入一条边<j, k >,就需要建立一个边结点,并将它链入相应边链表中,统计入度信息:
EdgeNode *p = new EdgeNode; p->adjvex = k; p->nextarc = G.VexList[j].firstarc; data[j].firstarc = p; count[k]++;

在算法中,使用一个存放入度为0的顶点的链式栈,供选择和输出无前驱的顶点。
算法描述:
建立入度为0的顶点栈;
当入度为0的顶点栈不为空时,重复执行
从顶点栈中推出一个顶点,并输出之;
从AOV网络中删去这个顶点和它发出的边,边的总顶点入度减一;
如果边的终顶点入度减至0,则该顶点进入入度为0的顶点栈;
如果输出顶点个数少于AOV网络的顶点个数,则报告网络中存在有向环。
算法分析:
如果AOV网络中有n个顶点,e条边,在拓扑排序的过程中,搜索入度为0的顶点,建立链式栈所需要的时间是O(n)。在正常的情况下,有向图有n个顶点,每个顶点进入一次栈,出一次栈,共输出n次。顶点入度减一的运算共执行了e次。所以总的时间复杂度为O(n+e).