| SIFT算法:DoG尺度空间生产 |
| SIFT算法:KeyPoint找寻、定位与优化 |
| SIFT算法:确定特征点方向 |
| SIFT算法:特征描述子 |
目录:
1、找寻
2、定位
3、优化
1 KeyPoint找寻
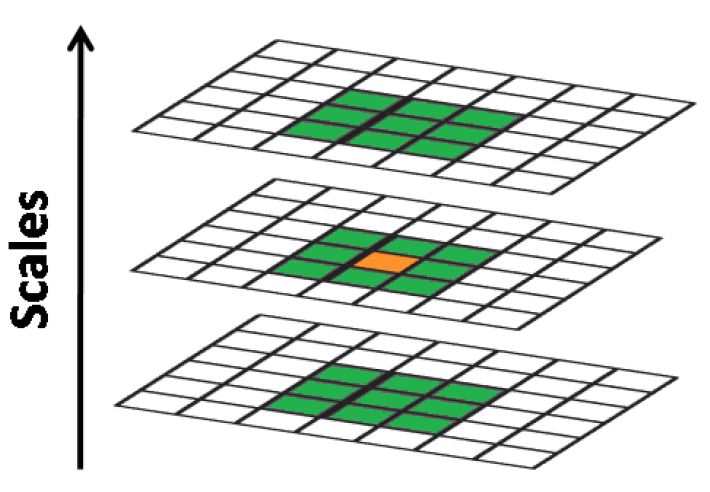
极值的检测是在DoG空间进行的,检测是以前点为中心,3pixel*3pixel*3pixel的立方体为邻域,判断当前点是否为局部最大或最小。如下图所示,橘黄色为当前检测点,绿色点为其邻域。因为要比较当前点的上下层图像,所以极值检测从DoG每层的第2幅图像开始,终止于每层的倒数第2幅图像(第1幅没有下层,最后1幅没有上层,无法比较)。
2 KeyPoint定位
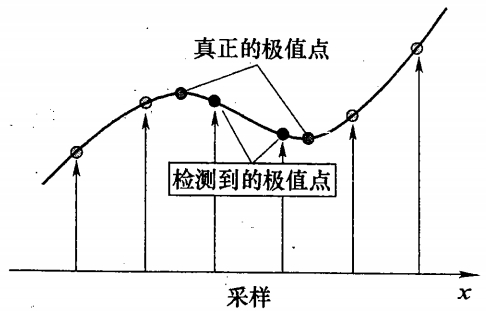
以上极值点的搜索时在离散空间中进行的,检测到的极值点并不是真正意义上的极值点。如下图所示,连续空间中极值与离散空间的区别。通常通过插值的方式,利用离散的值来插值,求取接近真正的极值的点。
对于一维函数,利用泰勒级数,将其展开为二次函数:
f(x) ≈ f(0) + f'(0)x + f''(0)x2
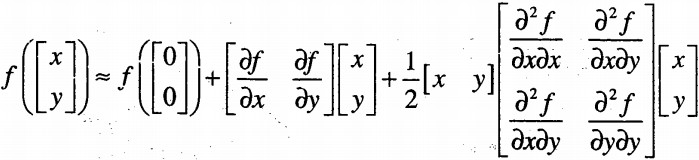
对于二维函数,泰勒展开为:
![]()
矩阵表示为:
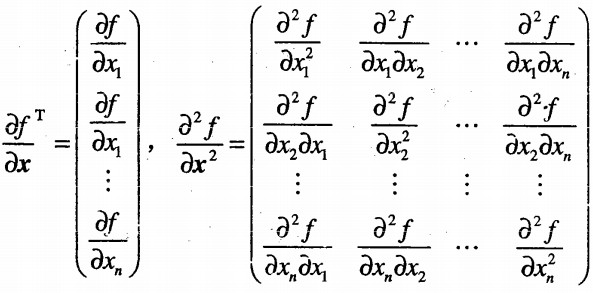
矢量表示为:
![]()
当矢量为n维时,有:
求取f(x)的极值,只需求取∂f/∂x = 0。对于极值,x,y,σ三个变量,即为三维空间。利用三维子像元插值,设其函数为D(x, y, σ),令x = (x, y, σ)T,那么在第一节中找到的极值点进行泰勒展开为(式-1)如下:
![]()
其中D为极值点的值,∂DT/∂x为在极值点各自变量的倒数,∂2D/∂x2为其在展开点相应的矩阵。对上式求导,另∂D(x)/∂x = 0,结果如下式,对应的 (为了表示方便,ˆx代替)向量即为真正极值点偏离插值点的量。求解得(式-2)如下:
(为了表示方便,ˆx代替)向量即为真正极值点偏离插值点的量。求解得(式-2)如下:
![]()
最终极值点的位置即为插值点x+ˆx,且多次迭代可以提高精度(一般为5次迭代)。
问题 1:
《图像局部不变性特征与描述》中提到,对于偏移量ˆx任何方向上偏移大于0.5的特征点,要删除该点。
对于Lowe的原文为:If the offset ˆx is larger than 0.5 in any dimension, then it means that the extremum lies closer to a different sample point. In this case, the sample point is changed and the interpolation performed instead about that point.
本人英语水平有限,个人认为原作者并未说要删除此类点,只是说这个点偏移了,所以需要插值来进行替换。且在OpenCV sift的源码中,并未删除上述类型的点,在vlfeat的开源代码中,也未删除上述点。
3 KeyPoint优化
对KeyPoint定位后,要剔除一些不好的KeyPoint,那什么是不好的KeyPoint的呢?
- DoG响应较低的点,即极值较小的点。
- 响应较强的点也不是稳定的特征点。DoG对图像中的边缘有较强的响应值,所以落在图像边缘的点也不是稳定的特征点。一方面图像边缘上的点是很难定位的,具有定位的歧义性;另一方面这样的点很容易受到噪声的干扰变得不稳定。
对于第一种,只需计算矫正后的点的响应值D(ˆx),响应值小于一定阈值,即认为该点效应较小,将其剔除。将(式-2)带入(式-1),求解得:
![]()
在Lowe文章中,将|D(ˆx)|<0.03(图像灰度归一化为[0,1])的特征点剔除。
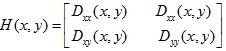
对于第二种,利用Hessian矩阵来剔除。一个平坦的DoG响应峰值在横跨边缘的地方有较大的主曲率,而在垂直边缘的地方有较小的主曲率。主曲率可以通过2×2的Hessian矩阵H求出:
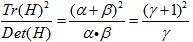
 为最大特征值,
为最大特征值, 为最小特征值,那么:
为最小特征值,那么: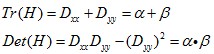
参考资料:
- David G. Lowe Distinctive Image Features from Scale-Invariant Keypoints
- 王永明 王贵锦 《图像局部不变性特征与描述》