1旋转矩阵推导(2D)

2为何引入齐次坐标
(解决,利用矩阵解决仿射变换)
-
定义 (3D同理)
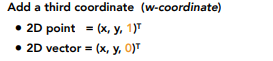
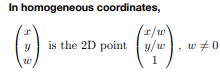
-
对比
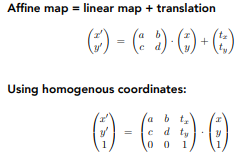
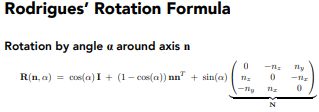
3旋转
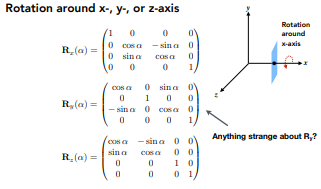
- 待验证???
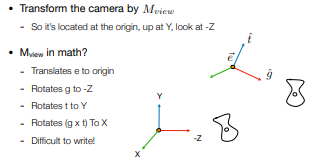
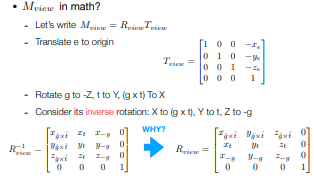
4view变换
5投影变换
5.1 正交投影

解读:本质压缩成[-1,1]^3 的cube
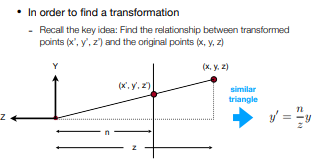
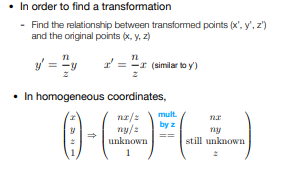
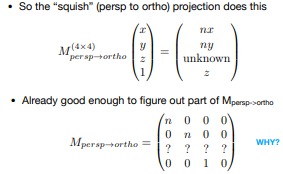
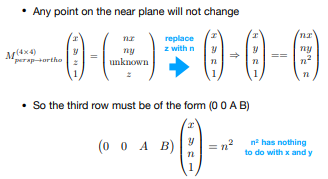
5.2 透视投影
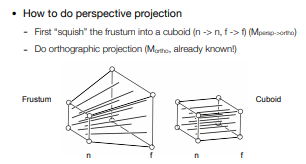
解读:本质压缩成[-1,1]^3 的cube
- 求解过程推导(选读)


(解决,利用矩阵解决仿射变换)
定义 (3D同理)
对比
解读:本质压缩成[-1,1]^3 的cube
解读:本质压缩成[-1,1]^3 的cube