凸包
参考
多边形快速凸包算法(Melkman‘s Algorithm)
还可以这看cpp的代码: https://www.cnblogs.com/VividBinGo/p/11637684.html
定义
凸包又叫凸多边形,本篇文章可能混用两种说法,
形象的理解就是一些点(点集)用一根橡皮筋紧紧地包裹外边点.
如果知道了这个定义,那么还有:
用一个保鲜膜裹着三维点,求膜上点集.
用一个最小的球裹着三维点,求球球的中心点和直径.
这样就进入了一个叫拓扑学的学科上.......我的老天鹅.
我竟然搜了半天没看到可以直接拿来用的c#代码,还是小轩轩给我的....
葛立恒凸包
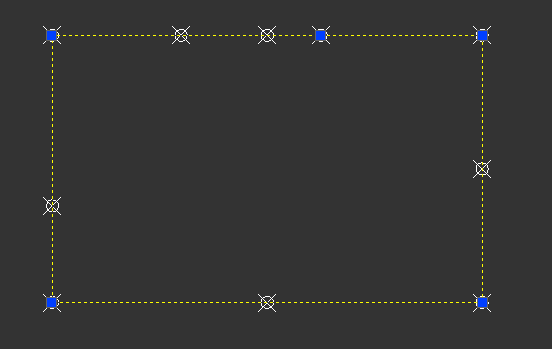
注意一下,如果点集形成的是正交矩形的情况时,
算出来的凸包会多一个点,可以进行后处理.
(你会发现代码实际上是右上角最大点开始的,其他的教程说明从最小点开始算,
这需要知道的是最小最大都是边界点,边界点必然是凸包的边点,用谁起算都可以)
实现方式
db.Action(tr => 的委托见:https://www.cnblogs.com/JJBox/p/12196287.html


#if !HC2020 using Autodesk.AutoCAD.ApplicationServices; using Autodesk.AutoCAD.DatabaseServices; using Autodesk.AutoCAD.EditorInput; using Autodesk.AutoCAD.Geometry; using Autodesk.AutoCAD.Runtime; #else using GrxCAD.DatabaseServices; using GrxCAD.EditorInput; using GrxCAD.Geometry; using GrxCAD.ApplicationServices; using GrxCAD.Runtime; using GrxCAD.Colors; using GrxCAD.GraphicsInterface; using Viewport = GrxCAD.DatabaseServices.Viewport; #endif using System.Collections.Generic; using System.Linq; namespace JoinBox.src.数学操作 { public class Graham { /* 视频参考: https://www.bilibili.com/video/BV1v741197YM 相关学习: https://www.cnblogs.com/VividBinGo/p/11637684.html ① 找到所有点中最左下角的点_p0(按 x 升序排列,如果 x 相同,则按 y 升序排列) ② 以_p0为基准求所有点的极角,并按照极角排序(按极角升序排列,若极角相同,则按距离升序排列),设这些点为p1,p2,……,pn-1 ③ 建立一个栈,_p0,p1进栈,对于P[2..n-1]的每个点,利用叉积判断, 若栈顶的两个点与它不构成"向左转(逆时针)"的关系,则将栈顶的点出栈,直至没有点需要出栈以后,将当前点进栈 ④ 所有点处理完之后栈中保存的点就是凸包了。 */ /// <summary> /// 最靠近x轴的点(必然是凸包边界的点) /// </summary> private Point2d _p0; /// <summary> /// 角度p0和pn的角度 /// </summary> /// <param name="pn"></param> /// <returns></returns> private double Cosine(Point2d pn) { double d = _p0.GetDistanceTo(pn); //距离是相同返回1.0表示true:那么求角度(高/斜)==sin(角度) return d == 0.0 ? 1.0 : (pn.Y - _p0.Y) / d; } /// <summary> /// 叉乘,顺时针方向为真,表示要剔除 /// </summary> /// <param name="n"></param> /// <param name="a"></param> /// <param name="b"></param> /// <returns></returns> private bool Clockwise(Point2d n, Point2d a, Point2d b) { return ((a.X - b.X) * (a.Y - n.Y) - (a.X - n.X) * (a.Y - b.Y)) > -1e-6; } /// <summary> /// 葛立恒求凸包 /// </summary> /// <param name="pts"></param> /// <returns></returns> private Point2d[] ConvexHull(List<Point2d> pts) { //消重 pts = pts.Distinct().ToList(); //靠近x轴的点 _p0 = pts.OrderBy(p => p.X).ThenBy(p => p.Y).Last(); //按角度及距离排序 pts = pts.OrderByDescending(p => Cosine(p)).ThenBy(p => _p0.GetDistanceTo(p)).ToList(); var stack = new Stack<Point2d>(); stack.Push(_p0);//顶部加入对象 stack.Push(pts[1]); bool tf = true; //遍历所有的点,因为已经角度顺序,所有是有序遍历.从第三个点开始 for (int i = 2; i < pts.Count; i++) { Point2d qn = pts[i]; //第一次为p2,相当于pn Point2d q1 = stack.Pop(); //第一次为p1,相当于前一个点,删除顶部对象(相当于点回退) Point2d q0 = stack.Peek();//第一次为_p0,相当于后面一个点,查询顶部对象 while (tf && Clockwise(qn, q1, q0))//顺时针方向为真,表示要剔除 { if (stack.Count > 1)//保护栈中_p0不剔除 { stack.Pop();//删除顶部对象(相当于删除前一个点进行回退) //前后点交换,用于while循环, //可参考 https://www.bilibili.com/video/BV1v741197YM 04:15 //栈顶就是回滚之后的,再次和qn进行向量叉乘,看看是不是顺时针,是就继续回滚.. //否则结束循环后加入栈中. q1 = q0; q0 = stack.Peek(); } else { tf = false; } } stack.Push(q1); stack.Push(qn); tf = true; } return stack.ToArray(); } /// <summary> /// 葛立恒求法 /// </summary> [CommandMethod("Test_Gra")] public void Test_Gra() { Document doc = Application.DocumentManager.MdiActiveDocument; Editor ed = doc.Editor; Database db = doc.Database;//当前的数据库 ed.WriteMessage(" ****{惊惊盒子}葛立恒求凸包,选择曲线:"); //定义选择集选项 var pso = new PromptSelectionOptions { RejectObjectsOnLockedLayers = true, //不选择锁定图层对象 AllowDuplicates = true, //不允许重复选择 }; var ssPsr = ed.GetSelection(pso);//手选 这里输入al会变成all,无法删除ssget的all关键字 if (ssPsr.Status != PromptStatus.OK) { return; } db.Action(tr => { var pts = new List<Point2d>(); foreach (ObjectId id in ssPsr.Value.GetObjectIds()) { var ent = id.ToEntity(tr); if (ent is Curve curve) { var cs = new CurveSample<Point2d>(curve, 300); pts.AddRange(cs.GetSamplePoints); } else if (ent is DBPoint dbPt) { pts.Add(new Point2d(dbPt.Position.X, dbPt.Position.Y)); } } Point2d[] npts = ConvexHull(pts); var bv = new List<BulgeVertex>(); for (int i = 0; i < npts.Length; i++) { bv.Add(new BulgeVertex(npts[i], 0)); } Entity pl = EntityAdd.AddPolyLineToEntity(0, bv); tr.AddEntityToMsPs(db, pl); }); } } }
子函数:cad曲线采样
namespace JoinBox.src.数学操作 { public class CurveSplit<TPoint> where TPoint : struct, IFormattable { Curve _curve { get; set; } double _fixedValue { get; set; } /// <summary> /// 求间隔点 /// </summary> /// <param name="curve">曲线</param> /// <param name="fixedValue">定值分割</param> public CurveSplit(Curve curve, double fixedValue) { _curve = curve; _fixedValue = fixedValue; } /// <summary> /// 获取定值分割的曲线集合 /// </summary> /// <returns></returns> public List<Curve> GetSplitCurves { get { var lstCurves = new List<Curve>(); //算曲线长度 double totalLength = _curve.GetLength(); //若少于定值,则直接返回这长度 if (totalLength < _fixedValue) { lstCurves.Add(_curve); return lstCurves; } double addLength = 0; var pt3dCol = new Point3dCollection(); //这段代码通过定值采集点 while (addLength < totalLength) { //求起点到长度的点 pt3dCol.Add(_curve.GetPointAtDist(addLength)); addLength += _fixedValue; } if (addLength != totalLength) { pt3dCol.Add(_curve.GetPointAtDist(totalLength)); } //通过点集,分割曲线,可能有精度问题...... var splits = _curve.GetSplitCurves(pt3dCol); foreach (var item in splits) { lstCurves.Add((Curve)item); } splits.Dispose();//释放 return lstCurves; } } } public class CurveSample<TPoint> where TPoint : struct, IFormattable { Curve _curve { get; set; } int _numSample { get; set; } = 1; /// <summary> /// 求采样 /// </summary> /// <param name="curve">曲线</param> /// <param name="numSample">采样份数</param> public CurveSample(Curve curve, int numSample) { _curve = curve; _numSample = numSample; } /// <summary> /// 曲线采样 /// </summary> /// <returns></returns> public List<TPoint> GetSamplePoints { get { if (_numSample == 0) { throw new System.Exception("NumSample参数不能为0"); } // https://www.cnblogs.com/luludongxu/p/5669729.html // 泛型构造传参 // 泛型是point2d时候参数是XY,我传入的obj数组有3个值,竟然能自动忽略到末尾的z Type T = typeof(TPoint); var length = _curve.GetLength(); var fixedValue = length / _numSample; var cs = new CurveSplit<TPoint>(_curve, fixedValue); var spls = cs.GetSplitCurves; var pts = new List<TPoint>(); pts.Add((TPoint)Activator.CreateInstance(T, spls[0].StartPoint.ToArray()));//起点 foreach (var item in spls) { pts.Add((TPoint)Activator.CreateInstance(T, item.EndPoint.ToArray()));//间隔点,尾点 } return pts; } } } }
包围盒
参考
因为没看懂的关系,所以我自己想了以下的粗糙方法实现....毕竟我真的看不懂cpp....
我还发现游戏行业还有快速平方根,模糊距离,快速包围盒等等的实现......而cad只能用精确的包围盒 :)
定义
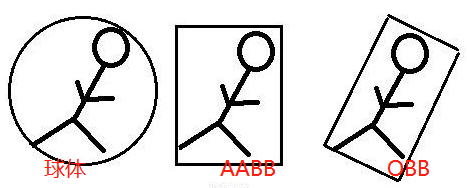
包围盒又叫外接矩形,如下图形式:
先了解AABB叫轴向包围盒,这是cad自带函数可以求得的.(求最小点和最大点).
再是今次的主角OBB有向包围盒.
包围盒分二维和三维,由于三维在我的领域内没啥用途,所以我只实现了二维包围盒,
当然了,如果你已经掌握点乘和叉乘的要领,那么你可以根据二维来写出三维来.
条件
条件1: 包围盒不是出现在点集形成的图形上,而是出现在点集的凸包上,看下图可知:
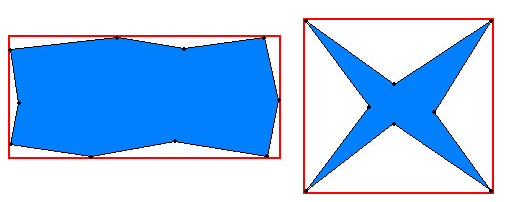
条件2:包围盒的矩形边必然和凸包其中一条边重合,所以利用凸包,就可以实现面积最小的包围盒了.
实现方式
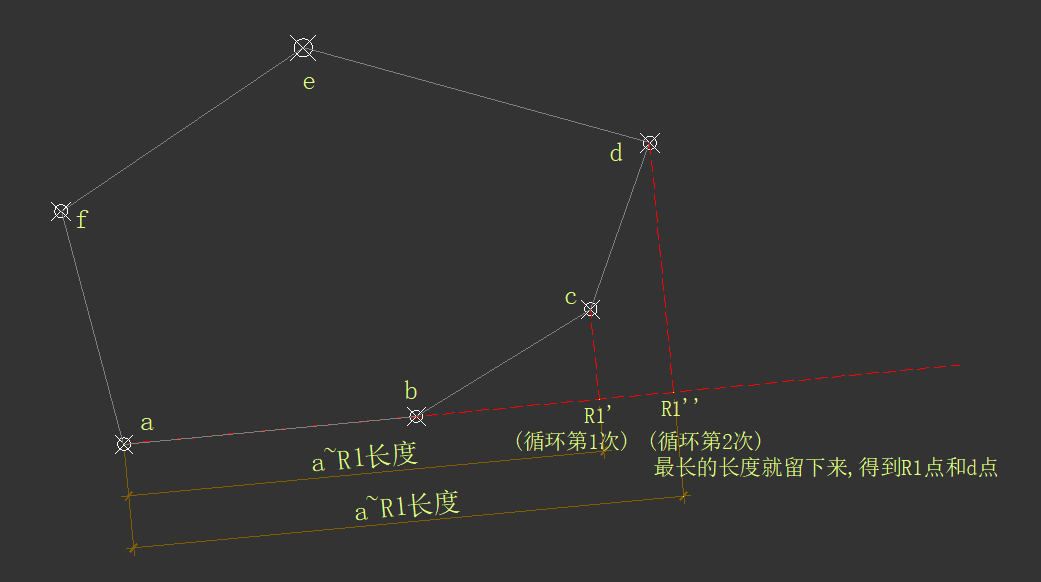
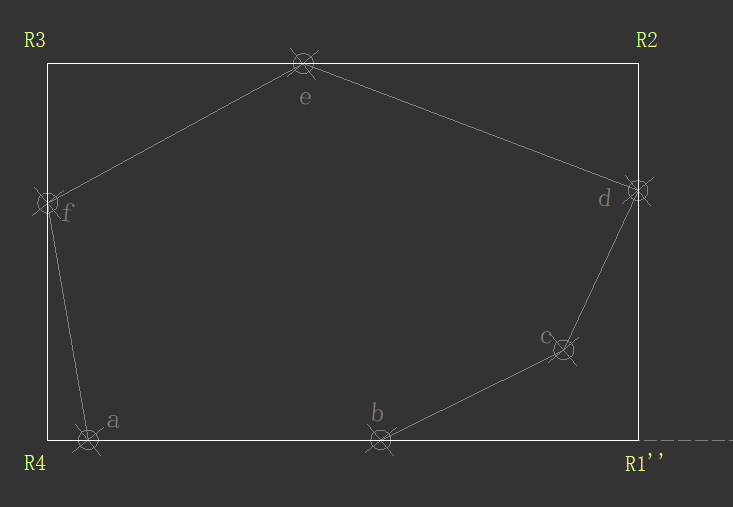
如图所示:
先求矩形的第一个角点r1,沿着a->b向量(无限长的线),角点r1会是c点落在这a->b向量上,得到a到r1的距离长度.
再来d点可能比c点更远,e点比d点更远......于是乎需要循环......
当循环出现了本次距离比上次小,说明找到了最后的r1角点了......
用一些数学语言描述一下:
矩形角点r1==a->c点乘a->b得到r1角点,再a->d点乘a->b...轮询,如果r1与a点距离开始进行缩小(点乘距离回归),
那么表示r1确定,以及得到末尾点ptLast=c点,
最后明确得到:a->ptLast点乘a->b就是最近角点r1.
求剩余的点,如下图所示:
矩形角点r2,r3,r4仅仅需要旋转点集得到,
通过a->b与X轴弧度(角度),绕r1旋转,然后进行坐标是数值交换即可得到一个ab段包围盒矩形.
其余包围盒:
现在知道了ab段,接着循环bc,cd,de等等....即可得到每个包围矩形,然后就可以求得最大或者最小的包围盒.
嘻嘻.说明到此结束.
代码
/// <summary> /// 有向包围盒 /// </summary> /// <param name="pts">点集</param> /// <returns>返回每条边的包围盒</returns> public static List<Rectangular> Boundingbox(List<Point2d> pts) { var recs = new List<Rectangular>(); //因为利用三点获取第一个交点, //所以为了最后的边界,需要加入集合前面,以使得成为一个环 pts.Add(pts[0]); pts.Add(pts[1]); pts.Add(pts[2]); pts.Add(pts[3]); //此处循环是作为边,下次则是ab..bc..cd..de..循环下去 for (int i = 0; i < pts.Count() - 1; i++) { //矩形的点 Point2d r1; Point2d r2; Point2d r3; Point2d r4; //最后一次的点 Point2d c_point; //上一次长度 double ac_lengthLast = -1; Point2d a_point = pts[i]; Point2d b_point = pts[i + 1]; //此处循环是求长度求r1点,如果出现点乘距离收缩,就结束 for (int c_nmuber = i + 2; c_nmuber < pts.Count(); c_nmuber++) { //ac->ab点乘求矩形的一个角点 //角点距离如果出现缩小,就确定了这个点是j var ac_length = a_point.GetDistanceTo(DotProduct(a_point, pts[c_nmuber], b_point)); //第一次赋值 if (ac_lengthLast == -1) { ac_lengthLast = ac_length; } else if (ac_lengthLast < ac_length) { ac_lengthLast = ac_length; } else { //此处条件是点乘距离已经收缩,求得r1点,最后会break结束循环. c_point = pts[c_nmuber - 1];//边界点-1就是上次的 r1 = DotProduct(a_point, c_point, b_point);//角点计算 { //根据角度旋转所有的点 var v1 = r1.GetVectorTo(a_point); var angle1 = v1.GetAngleTo(Vector2d.XAxis); var angle = v1.GetAngle2XAxis(); //此处循环是求r2,r3,r4的点 //后面的点旋转之后加入集合,再利用linq判断Y轴X轴最大的 var houmiandesuoyoudian = new List<Point2d>(); foreach (var pt in pts) { houmiandesuoyoudian.Add(pt.RotateBy(-angle, r1)); } var maxY = houmiandesuoyoudian.OrderByDescending(pt => pt.Y).ToList()[0].Y; var maxX = houmiandesuoyoudian.OrderByDescending(pt => pt.X).ToList()[0].X; //通过最大,计算角点,然后逆旋转,回到原始图形 r2 = new Point2d(r1.X, maxY).RotateBy(angle, r1); r3 = new Point2d(maxX, maxY).RotateBy(angle, r1); r4 = new Point2d(maxX, r1.Y).RotateBy(angle, r1); recs.Add(new Rectangular(r1, r2, r3, r4)); } break; } } } return recs; } /// <summary> /// 面积最小包围盒 /// </summary> /// <param name="pts">点集</param> /// <returns></returns> public static Rectangular BoundingboxAreaMin(List<Point2d> pts) { var recs = Boundingbox(pts); return recs.OrderBy(rec => rec.Area).ToArray()[0]; } public class Rectangular { public Point2d R1; public Point2d R2; public Point2d R3; public Point2d R4; /// <summary> /// 矩形类 /// </summary> /// <param name="r1">矩形的原点,依照它来旋转</param> /// <param name="r2"></param> /// <param name="r3"></param> /// <param name="r4"></param> public Rectangular(Point2d r1, Point2d r2, Point2d r3, Point2d r4) { R1 = r1; R2 = r2; R3 = r3; R4 = r4; R4 = r4; } /// <summary> /// 面积 /// </summary> public double Area { get { var x = R1.GetDistanceTo(R4); var y = R1.GetDistanceTo(R2); return x * y; } } }
子函数:旋转一个圆
1: 点乘叉乘的子函数参考 https://www.cnblogs.com/JJBox/p/14300098.html
2: X轴到向量的弧度(角度),cad的获取的弧度是1PI,所以转换为2PI(上小,下大)
/// <summary> /// X轴到向量的弧度,cad的获取的弧度是1PI,所以转换为2PI(上小,下大) /// </summary> /// <param name="ve">向量</param> /// <returns>弧度</returns> public static double GetAngle2XAxis(this Vector3d ve) { //世界重合到用户 Vector3d.XAxis->两点向量 double alz = Vector3d.XAxis.GetAngleTo(ve);//观察方向不要设置 alz = ve.Y > 0 ? alz : Pi2 - alz; //逆时针为正,如果-负值控制正反 alz = Math.Abs(Pi2 - alz) < 1e-10 ? 0 : alz; return alz; }
(完)