ROS中阶笔记(三):机器人仿真—ArbotiX+rviz功能仿真
01 机器人URDF模型优化—xacro模型文件
1.1 xacro模型文件
URDF模型的进化版本—xacro模型文件
xacro里面的模型仍然是urdf模型,但是从整个模型的管理上发生了很大的变化
- 精简模型代码
1、创建宏定义
2、文件包含 - 提供可编程接口
1、常量
2、变量
3、数学计算
4、条件语句
1.2 xacro使用方法
1.常量定义
<xacro:property name="M_PI" value="3.14159"/>
2.常量使用
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0"/>
3.数学计算
注意:所有数学运算都会转换成浮点数进行,以保证运算精度
<origin xyz="0 ${(motor_length+wheel_length)/2} 0" rpy="0 0 0"/>
4.宏定义
<xacro:macro name="name" params="A B C">
...... # ······填写具体模型定义(类似函数内容)
</xacro:macro>
5.宏调用
<name A="A_value" B="B_value" C="C_value" />
6.文件包含
<xacro:include filename="$(find mbot_descripiton)/urdf/xacro/mbot_base.xacro" />
1.3 模型显示
~/catkin_ws/src/mbot_description/urdf/xacro 下 mbot_base.xacro文件不能单独运行,还需要实现一个上层文件mbot.xacro来实现;
方法一: 将xacro文件转化成URDF文件后显示 (不常用)
在~/catkin_ws/src/mbot_description/urdf/xacro 下,运行下面命令:
$ rosrun xacro xacro.py mbot.xacro>mbot.urdf
# 出现警告忽略,看到生成mbot.urdf文件
方法二:直接调用xacro文件解析器,解析成机器人模型 (常用)
在~/catkin_ws/src/mbot_description/launch/xacro下 可以看到display_mbot_base_xacro.launch文件
<arg name="model" default="$(find xacro)/xacro --inorder '$(find mbot_description)/urdf/xacro/mbot.xacro'" />
<arg name="gui" default="true" />
<param name="robot_description" command="$(arg model)" />
$ roslaunch mbot_description display_mbot_base_xacro.launch
02 ArbotiX+rviz功能仿真
参见:http://wiki.ros.org/arbotix
2.1 Arboti简介
- ArbotiX是一款控制电机、舵机的硬件控制板;
- 提供了相应的ROS功能包;
- 提供了一个差速控制器,通过接收速度控制指令,更新机器人的里程计状态。
2.2 安装Arbotix
arbotix_ros文件放在catkin_ws/src/文件夹下:
$ cd ~/catkin_ws/src
$ git clone https://github.com/vanadiumlabs/arbotix_ros.git #放在catkin_ws/src/文件夹下
$ cd ~/catkin_ws
# 下面两种方法编译
$ catkin_make # 编译arbotix_ros
$ catkin_make -DCATKIN_WHITELIST_PACKAGES="arbotix_ros"
注意:arbotix_ros中的python文件需要添加可执行权限;
python文件添加可执行权限,鼠标右键—属性—权限—执行:√允许作为程序执行文件(E);
2.3 配置ArbotiX控制器
第一步:配置launch文件
~/catkin_ws/src/mbot_description/launch/xacro/下arbotix_mbot_with_camera_xacro.launch
可以看出它其实跟之前的launch文件是差不多的,只是多了一个启动 arbotix_python 节点的命令,这个文件在之前下的启动 arbotix_ros中可以找到,如果这里节点启动失败可以找到该文件,右键属性查看可执行权限,python文件需要添加可执行权限才能运行。
<launch>
<arg name="model" default="$(find xacro)/xacro --inorder '$(find mbot_description)/urdf/xacro/mbot_with_camera.xacro'" />
<arg name="gui" default="false" />
<param name="robot_description" command="$(arg model)" />
<!-- 设置GUI参数,显示关节控制插件 -->
<param name="use_gui" value="$(arg gui)"/>
<!-- 启动 arbotix_python 节点-->
<node name="arbotix" pkg="arbotix_python" type="arbotix_driver" output="screen">
<!-- 加载控制器参数-->
<rosparam file="$(find mbot_description)/config/fake_mbot_arbotix.yaml" command="load" />
<param name="sim" value="true"/>
</node>
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<!-- 运行rviz可视化界面 -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find mbot_description)/config/mbot_arbotix.rviz" required="true" />
</launch>
第二步:创建配置文件
~/catkin_ws/src/mbot_description/config/下fake_mbot_arbotix.yaml
这是一个参数配置文件,定义了一个controller。包括了控制器类型、控制的车体坐标系、轮子的间距、控制频率、PID以及加速度等参数
controllers: {
base_controller: {
type: diff_controller,
base_frame_id: base_footprint,
base_ 0.26,
ticks_meter: 4100,
Kp: 12,
Kd: 12,
Ki: 0,
Ko: 50,
accel_limit: 1.0
}
}
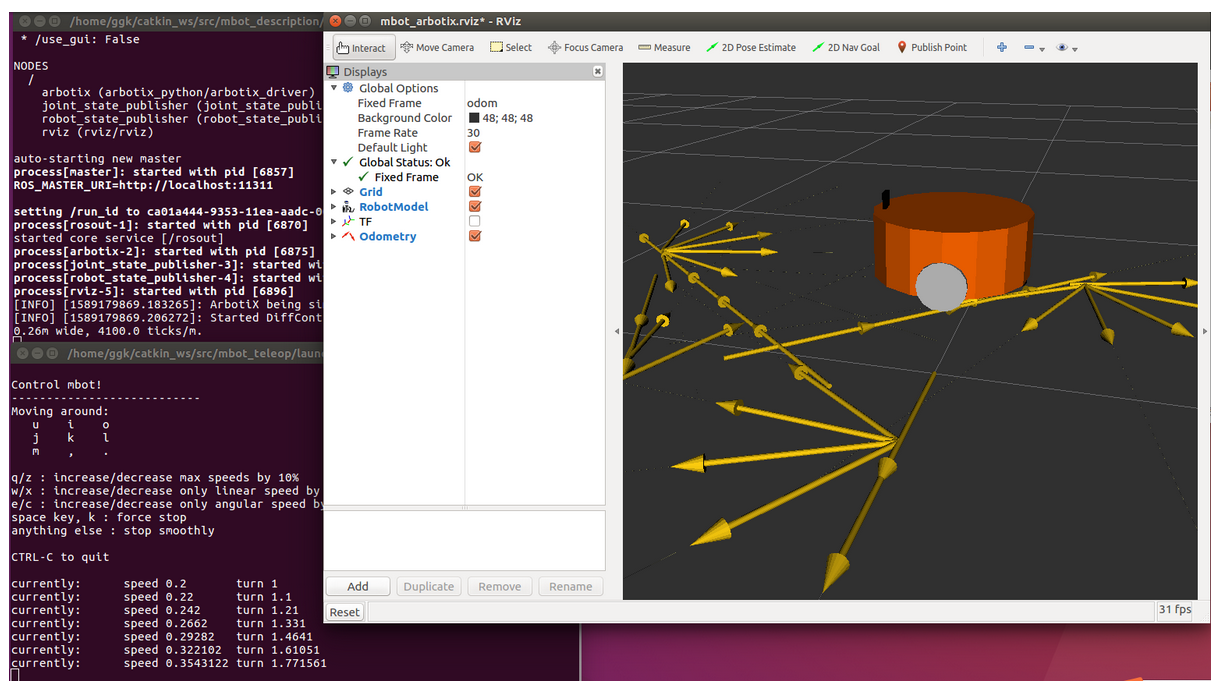
第三步:启动仿真器
$ roslaunch mbot_description arbotix_mbot_with_camera_xacro.launch
第四步:启动键盘控制(再开一个新终端)
$ roslaunch mbot_teleop mbot_teleop.launch
# i小车向前, u转向···
odom里程计坐标系,是一个全局坐标系;通过里程计记录机器人当前的运动位姿
2.4 ArbotiX+rviz—导航仿真示例
参考:《ROS by example》
1.安装一下turtlebot,输入下列安装命令:
$ sudo apt-get install ros-kinetic-turtlebot-*
2.安装arbotix模拟器:
$ sudo apt-get install ros-kinetic-arbotix-*
这里没有执行上面的rviz的安装是因为在安装ROS的时候默认已经安装好了,不需要重复安装。
3.安装ROS by example书配套的代码包rbx1
cd ~/catkin_ws/src
git clone https://github.com/pirobot/rbx1.git
cd ..
catkin_make
4.分别在三个终端运行以下代码:
$ roslaunch rbx1_bringup fake_turtlebot.launch
$ roslaunch rbx1_nav fake_amcl.launch map:=test_map.yaml
$ rosrun rviz rviz -d `rospack find rbx1_nav`/nav.rviz
运行结果:点击rviz画面中的2D Nav Goal ,之后随便标记地图中的一点,小车可以根据路径规划进行导航,到达目的地。
03 问题解决
3.1 问题一:ImportError: No module named arbotix_msgs.msg
2.3 配置ArbotiX控制器中
第三步:启动仿真器
$ roslaunch mbot_description arbotix_mbot_with_camera_xacro.launch
这里在开启上一个launch文件的时候出现了一个问题:缺少依赖项
ImportError: No module named arbotix_msgs.msg
解决方法:
不要 sudo apt-get安装,把源码包下载下来,编译;
顺便刷新下空间
$ source ~/catkin_ws/devel/setup.bash
04 参考资料
ROS xacro使用方法: http://wiki.ros.org/xacro
古月居:https://www.guyuehome.com/237
微信公众号:喵哥解说
公众号介绍:主要研究机器学习、计算机视觉、深度学习、ROS等相关内容,分享学习过程中的学习笔记和心得!期待您的关注,欢迎一起学习交流进步!同时还有1200G的Python视频和书籍资料等你领取!!!