该系列为DR_CAN自动控制原理视频笔记,详见https://space.bilibili.com/230105574
由于笔者水平有限,文中难免存在一些不足和错误之处,诚请各位批评指正。
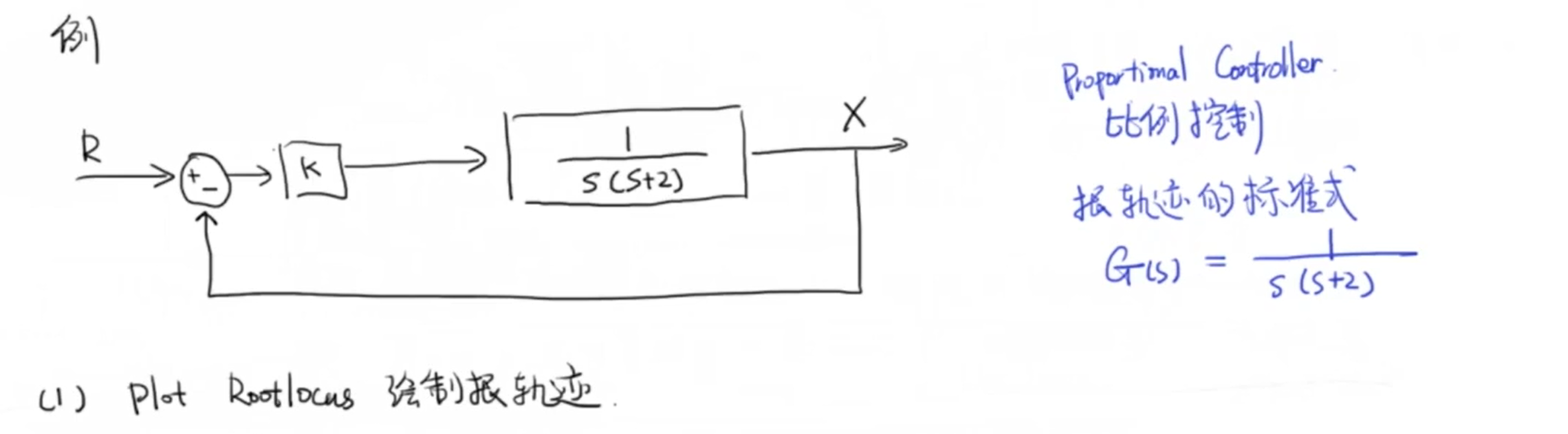
1 从根轨迹的角度分析
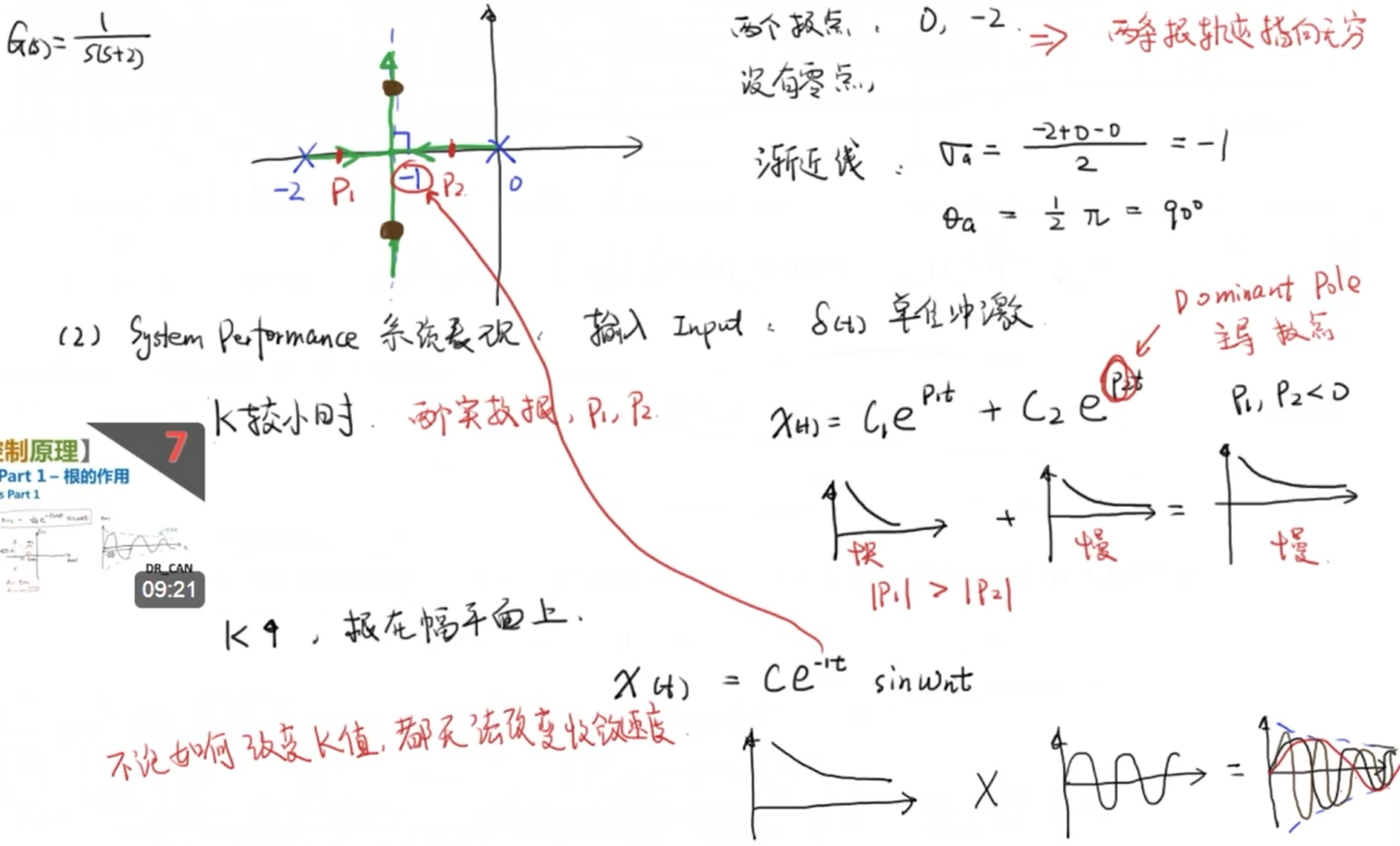
从下面这个例子我们了解到,对于二阶系统来说,无论如何如何改变K值,均无法提高收敛速度:
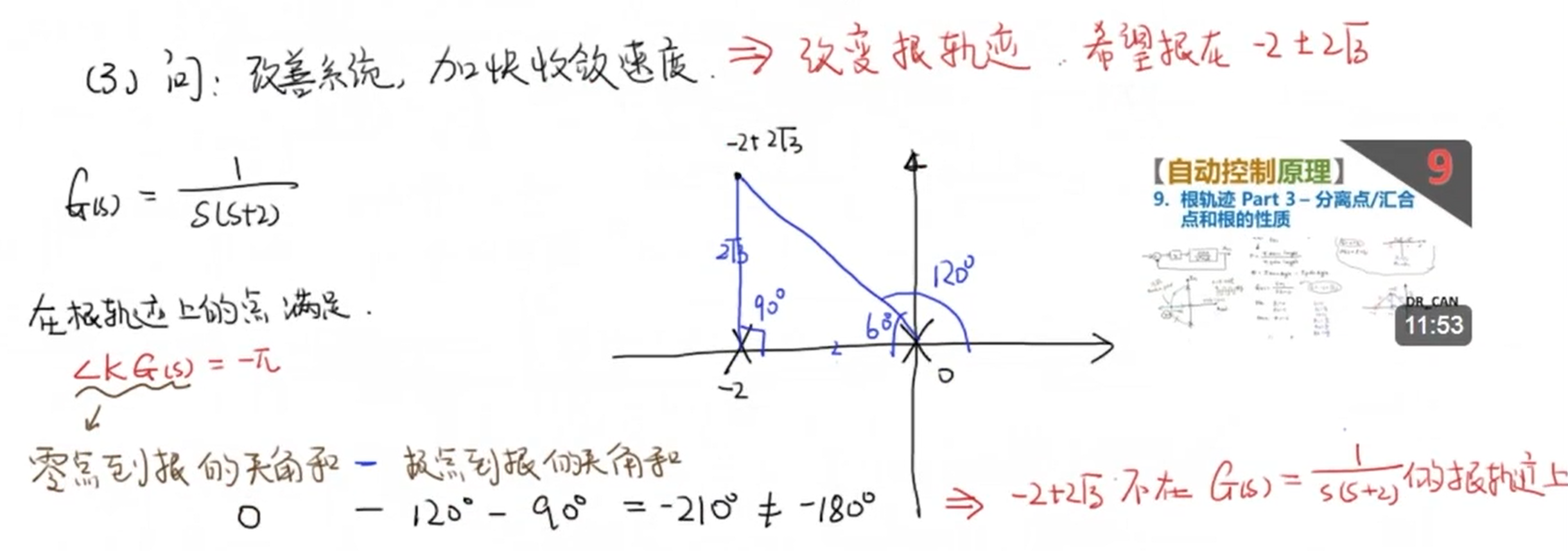
因此我们为了改善系统,也就是希望加快收敛速度,我们只能改变根轨迹。假设我们希望系统的极点位于 (-2 pm sqrt3) 的位置,用之前讲过的方法来验证这个点是否位于根轨迹上,我们发现这个点并不在当前的根轨迹上:
我们希望把根轨迹配置成过这个点的情况,可以通过零点来入手。我们看到现在有30°的幅角差,很简单的办法就是把零点到根的夹角和改成30°,这可以通过给系统添加一个零点来实现,经过简单的计算我们可以计算出这个零点为 -8 :

通过添加 (H(s)=s+8) 来给系统添加一个零点,我们看到 (s) 是一个微分项,而8是一个比例项,所有这就是一个典型的PD控制。
2 超前补偿器
在实际使用中PD控制存在一定的缺陷,包括无法通过被动元件实现、对高频噪声很敏感等缺点。因此这就需要超前补偿器(Lead Compensator):
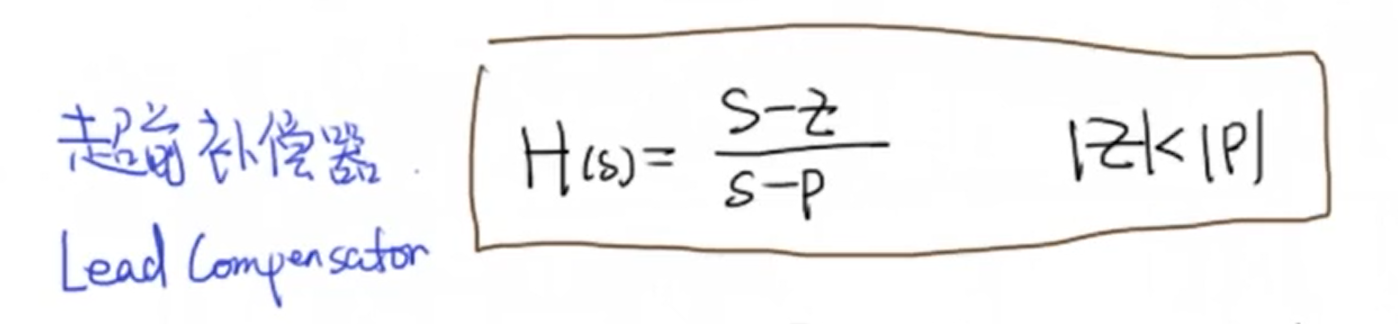
通过同时添加一个极点和零点来组成超前补偿器,其中零点应在极点的右侧。我们的最终目的还是为幅角补偿30°,在根轨迹图象上可以这样表示:
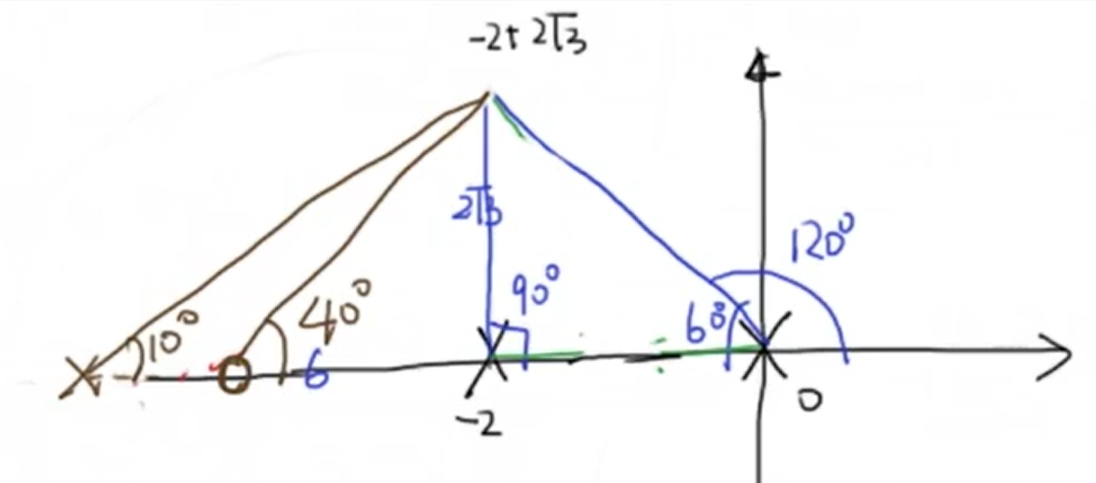
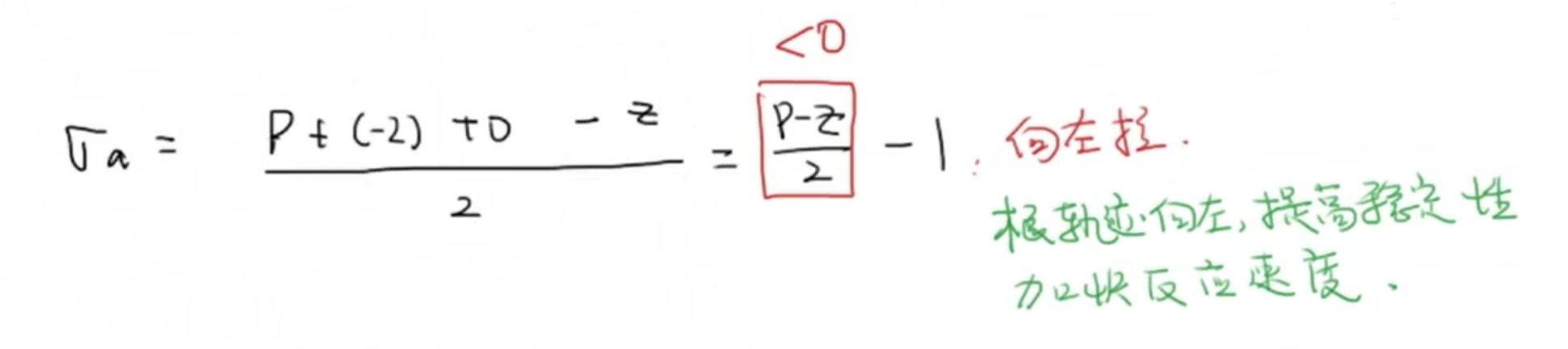
添加了一个极点和零点后我们需要重新绘制根轨迹,根据之前的结论,我们知道在这种情况下会有一个极点指向零点,两个极点指向负无穷。首先我们要先计算出根轨迹的渐近线,我们发现加入超前补偿器后根轨迹的渐近线向左移动了,这样既提高了系统的稳定性也加快了反应速度:
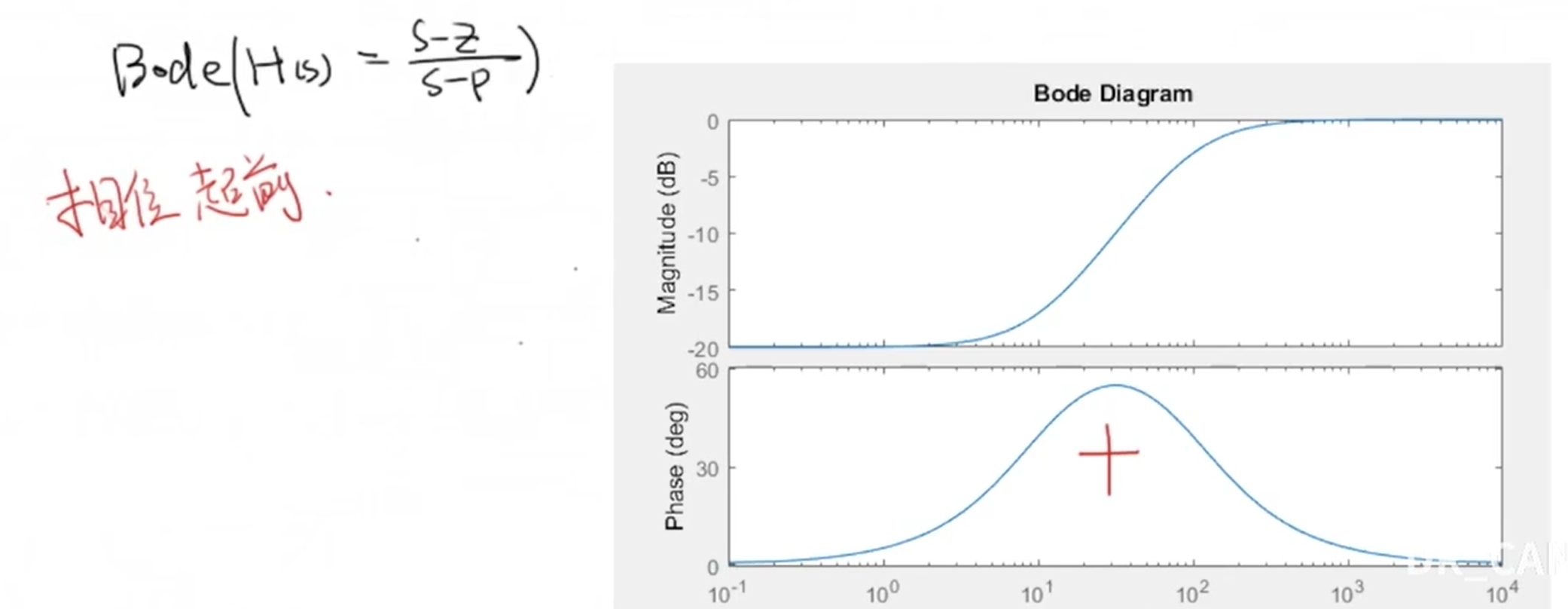
我们再来看一下超前补偿器的伯德图,我们可以发现他的相位是提前的,这也就是为什么我们叫他超前补偿器: