该系列为DR_CAN自动控制原理视频笔记,详见https://space.bilibili.com/230105574
由于笔者水平有限,文中难免存在一些不足和错误之处,诚请各位批评指正。
1 理解分离/汇合点
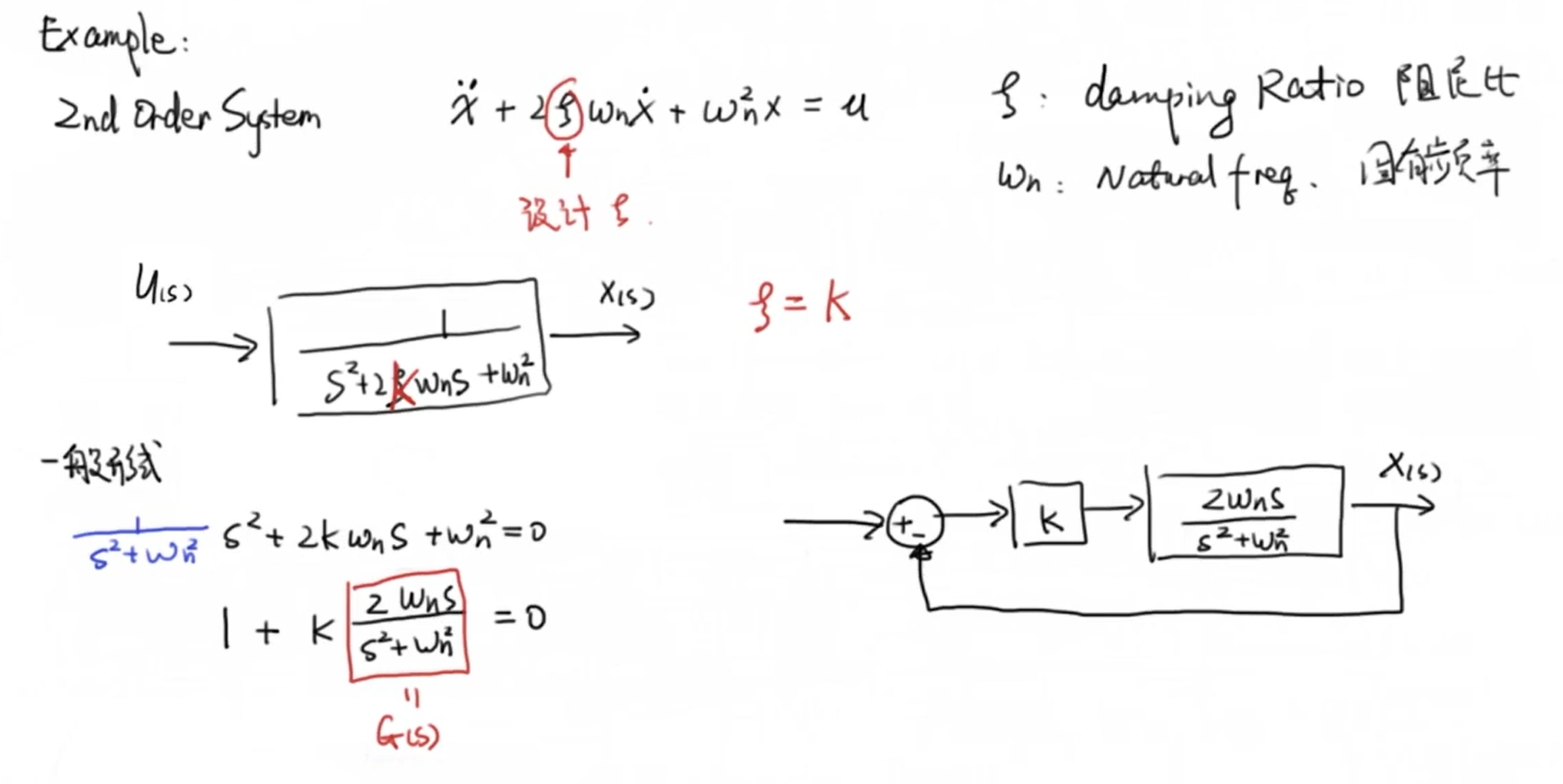
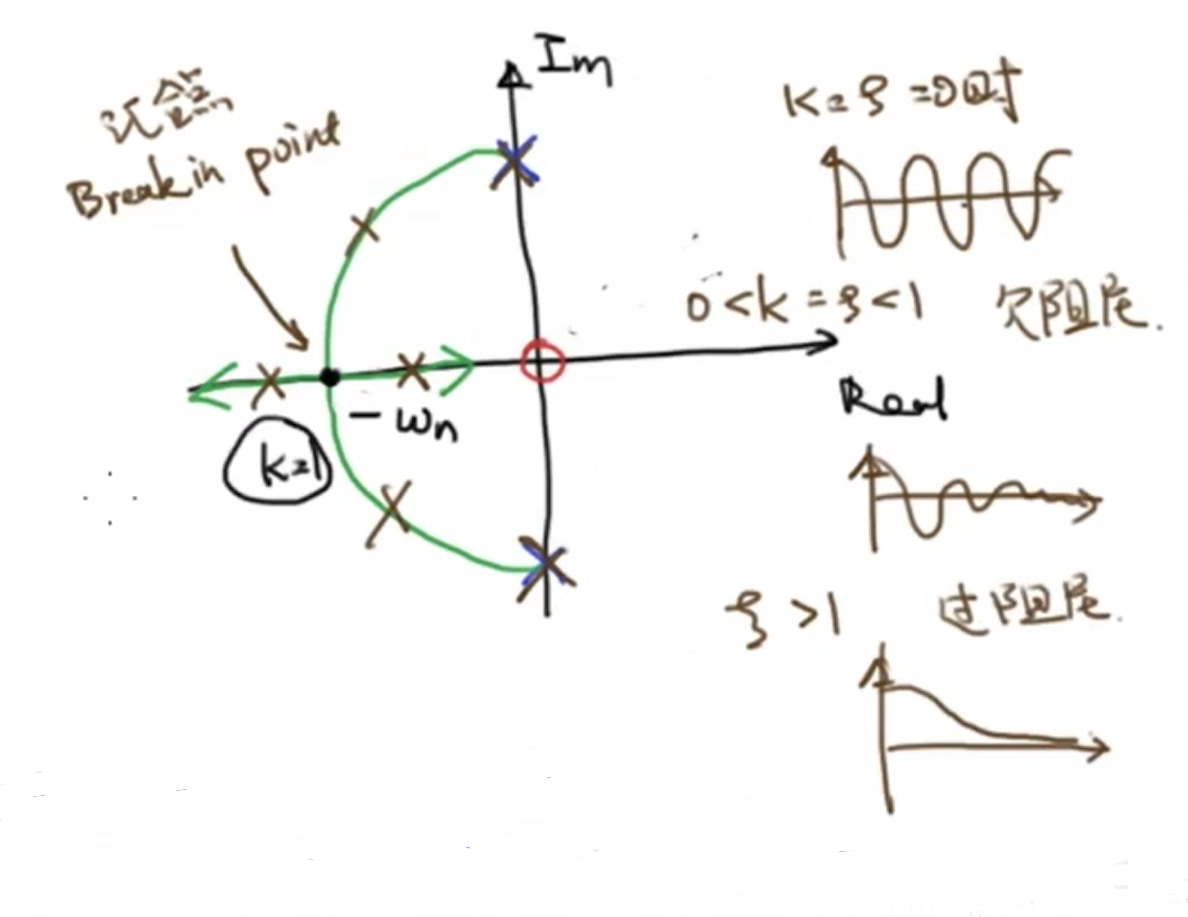
这里以二阶系统为例,我们希望通过根轨迹法设计系统的阻尼比 (zeta) ,即可令 (zeta=k) 。绘制根轨迹前我们需要先将传递函数的分母部分化位一般形式,并绘制出等效的系统框图:
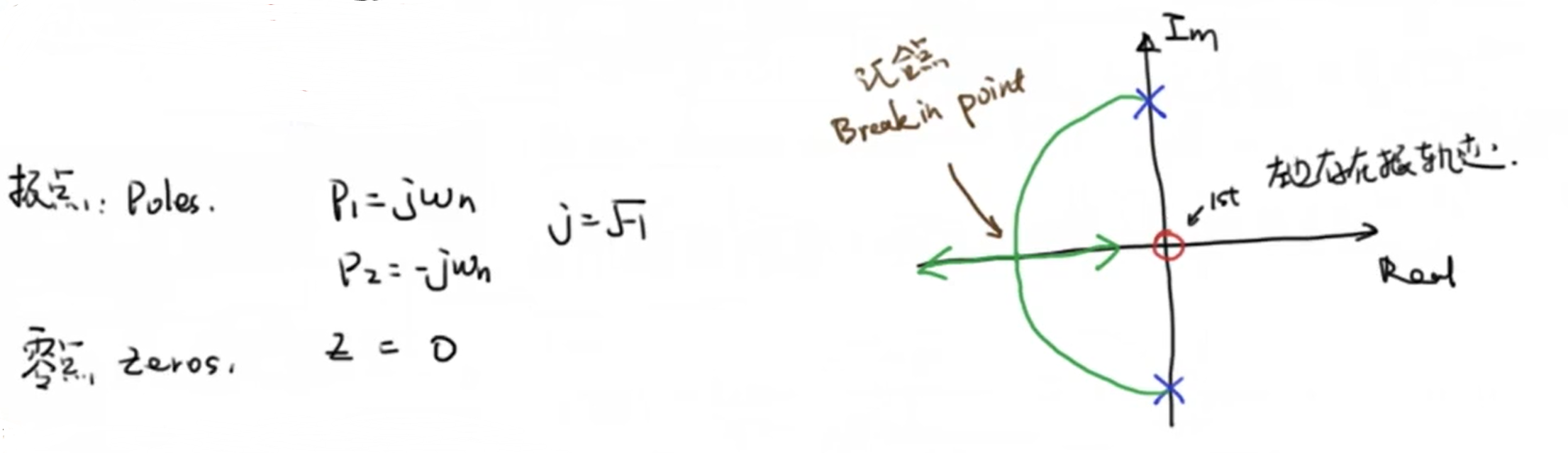
我们可以计算出系统的两个极点和一个零点,他们均在虚轴上。极点比零点多一个,因此会有一个极点指向零点一个极点指向负无穷,另外的,根轨迹关于实轴对称,因此我们可以得到下面的结果:
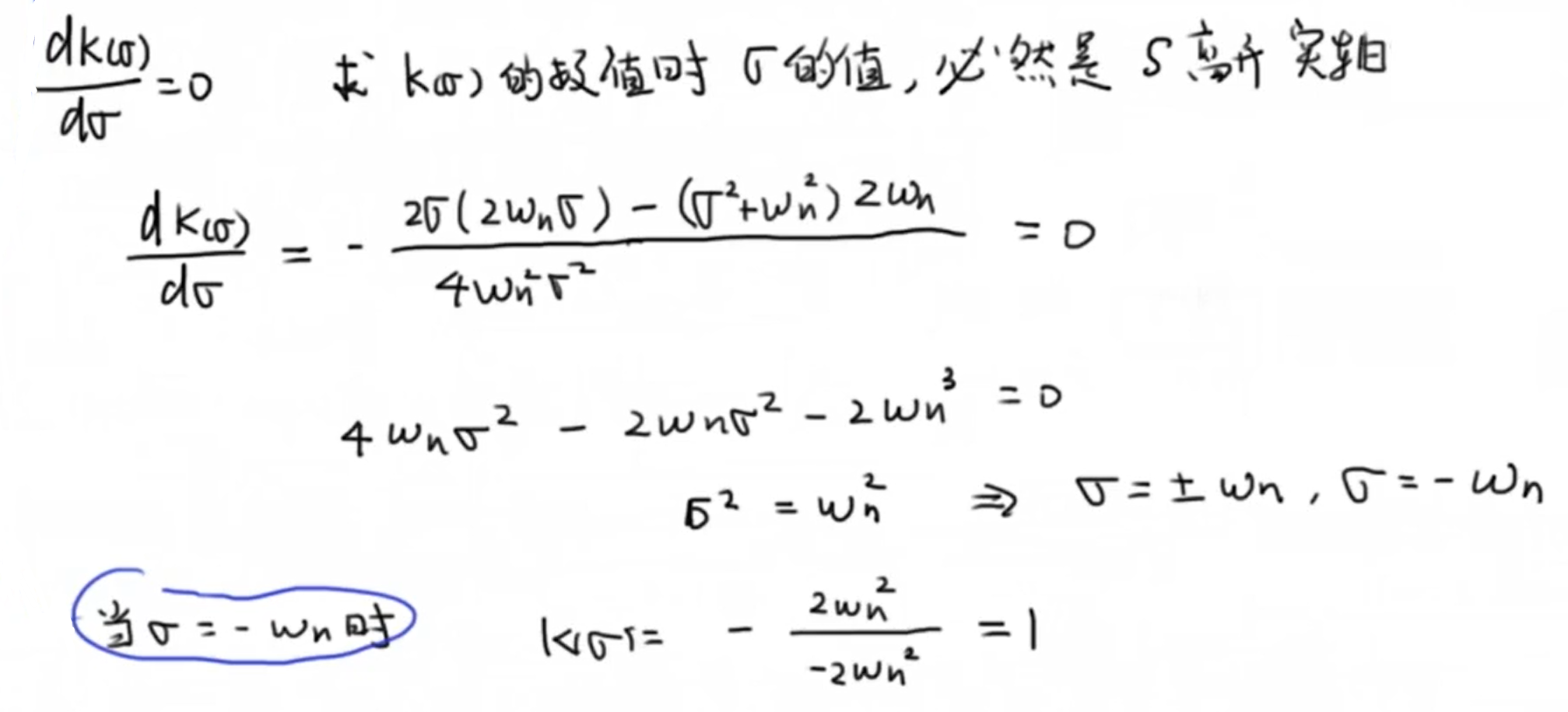
 接下来我们来计算这个汇合点的位置,通过对刚才的等式进行变形可以把 (k) 写成 (s) 的函数的形式。我们优质的这个汇合点在实轴上,因此 (s) 的虚部为0,即 (s = sigma) ,这样一来了 (k) 就变成了 (sigma) 的函数。接下来我们对 (sigma) 求一阶导,可以分析 (k) 的极值,而 (k) 的极值一定是 (s) 离开实轴的点。经过计算我们可以算出(sigma = pm omega_n) 是 (k) 的极值,将 (sigma = -omega_n) 带回表达式可以求出 (k=1) :
接下来我们来计算这个汇合点的位置,通过对刚才的等式进行变形可以把 (k) 写成 (s) 的函数的形式。我们优质的这个汇合点在实轴上,因此 (s) 的虚部为0,即 (s = sigma) ,这样一来了 (k) 就变成了 (sigma) 的函数。接下来我们对 (sigma) 求一阶导,可以分析 (k) 的极值,而 (k) 的极值一定是 (s) 离开实轴的点。经过计算我们可以算出(sigma = pm omega_n) 是 (k) 的极值,将 (sigma = -omega_n) 带回表达式可以求出 (k=1) :
这时我们带着这个结论,和 (k) 从0增大到正无穷的过程中根会有极点运动的零点的性质,来结合二阶系统的冲激响应进一步分析这个二阶系统的根轨迹,考虑到二阶系统冲激响应我们已经很熟悉了这里不再赘述:
2 根轨迹的性质
先回顾一下复数的一点性质:
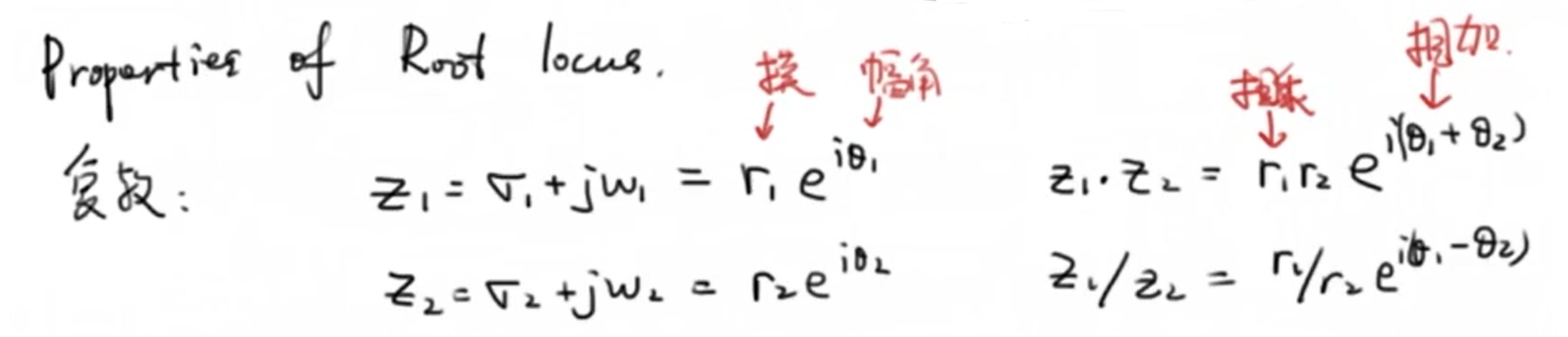
观察下面这个例子,我们发现:将一个 (s) 代入分子或分母得到的结果,他的模长和幅角与零点或极点到这个 (s) 的向量是完全相同的:
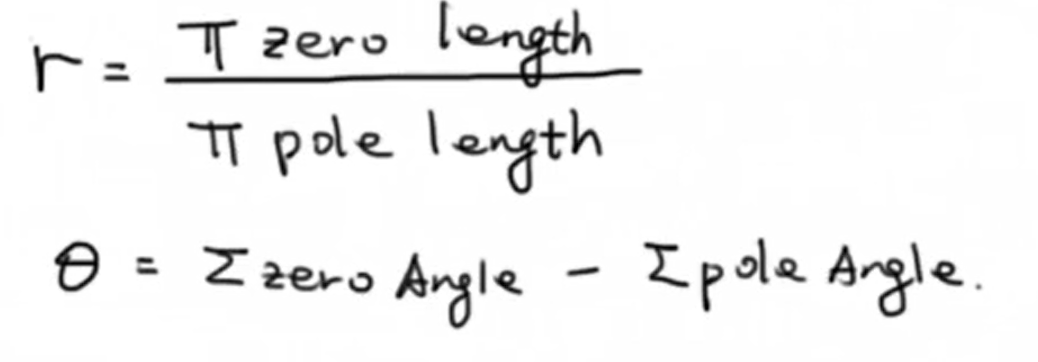
因此将复数代入传递函数我们有这样的结论, 我们把 (s) 代入传递函数后的结果的幅值等于所有零点到这个复数 (s) 距离的积,比上所有极点到这个复数的距离的积,而结果的幅角则等于所有零点与这个复数的夹角和,减去所有极点与这个复数的夹角和。即:
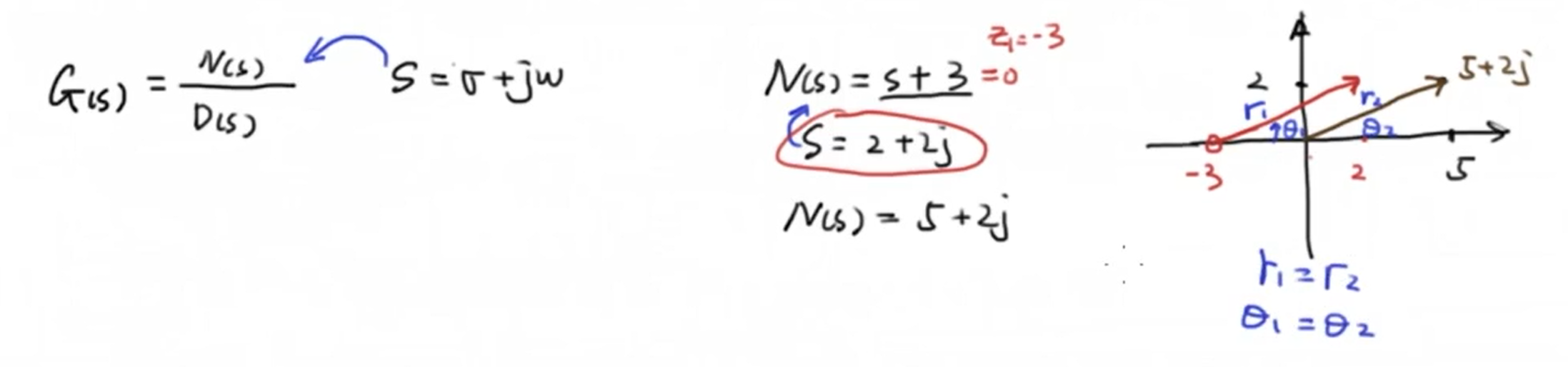
这么说有些晦涩难懂我们来看一个例子:
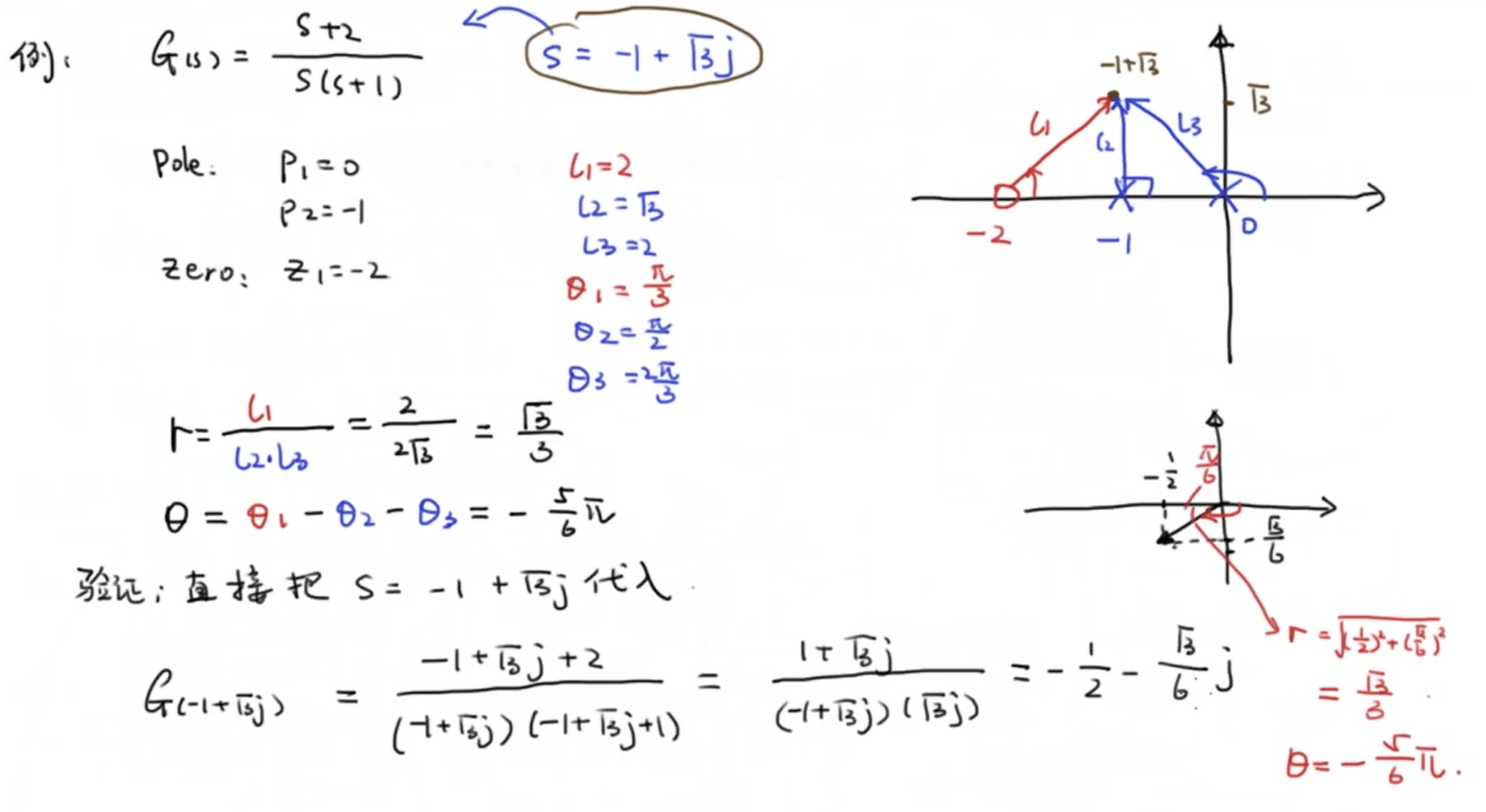
这样一来,我们就可以通过这种几何的方法很轻松的进行计算了。另外的,这种几何的方法也给后面设计控制器打下了基础。
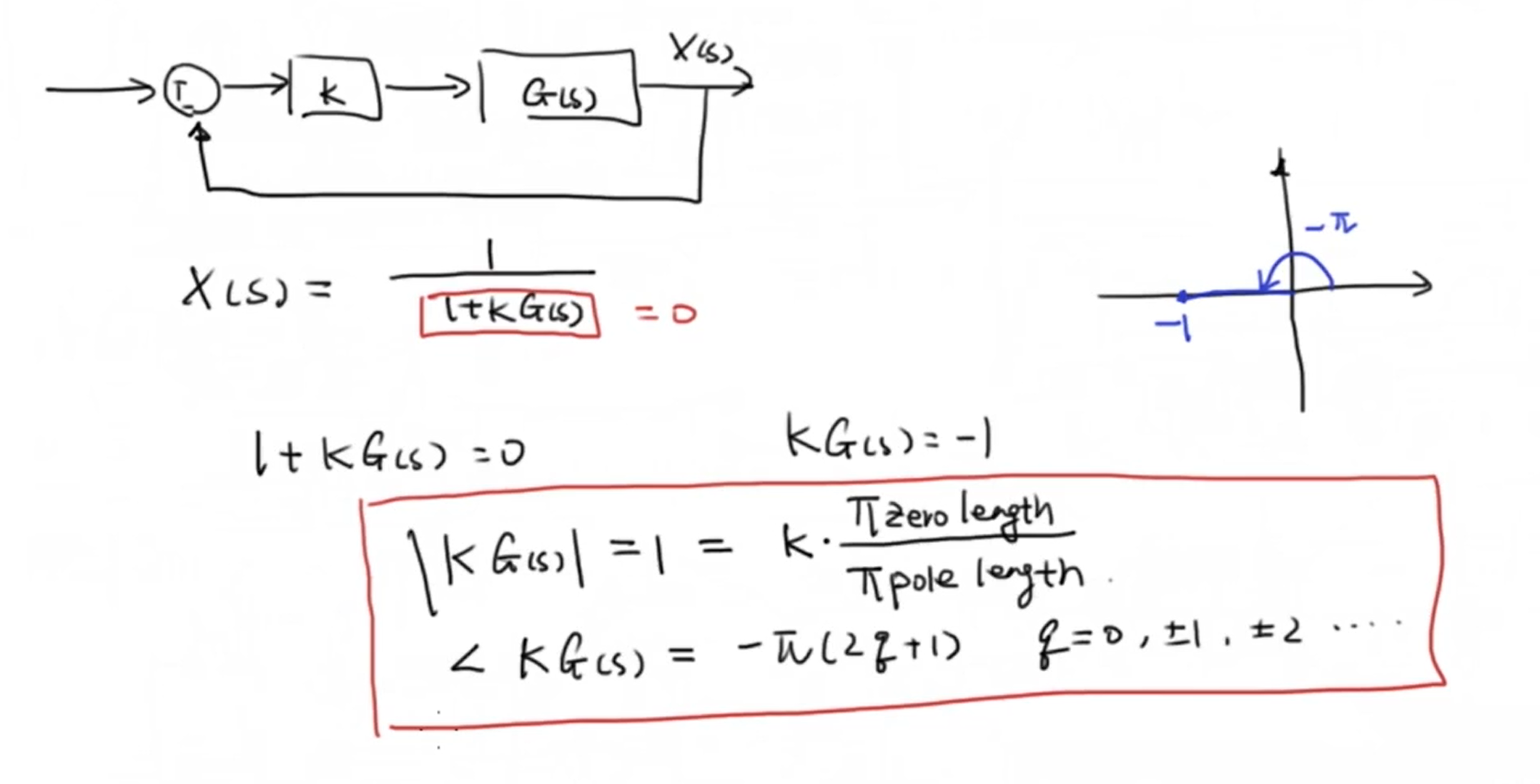
通过这种方法我们再来回到根轨迹。从根轨迹的标准形式中我们可以看到这个轨迹是 (kG(s)=-1) ,这是一个模长为1幅角为 (pi) 的复数,通过上面的几何方法,我们可以判断一个复数是否在根轨迹当中,也可以用来进一步设计控制器,具体使用再之后会讲到。