该系列为DR_CAN自动控制原理视频笔记,详见https://space.bilibili.com/230105574
由于笔者水平有限,文中难免存在一些不足和错误之处,诚请各位批评指正。
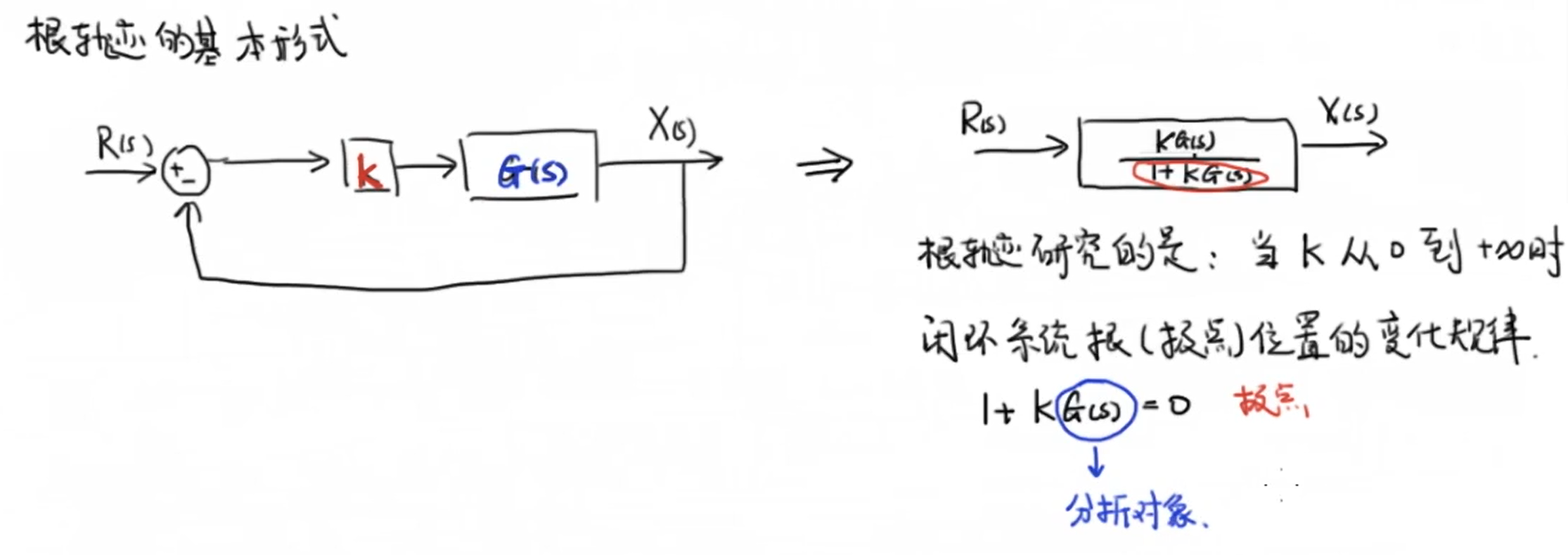
1 根轨迹的基本形式
现在我们可以通过MATLAB轻松的画出系统的根轨迹,因此根轨迹的手绘就不那么重要了。但是我们仍可以通过了解根轨迹的手绘技巧来理解其背后的数学规律,从而更好地融会贯通。
根轨迹研究的是控制器或补偿器系数变化时闭环系统根位置的变化规律。
如果系统框图中出现了 (H(s)) 则我们的分析对象需要就从 (G(s)) 变为 (G(s)H(s)) :

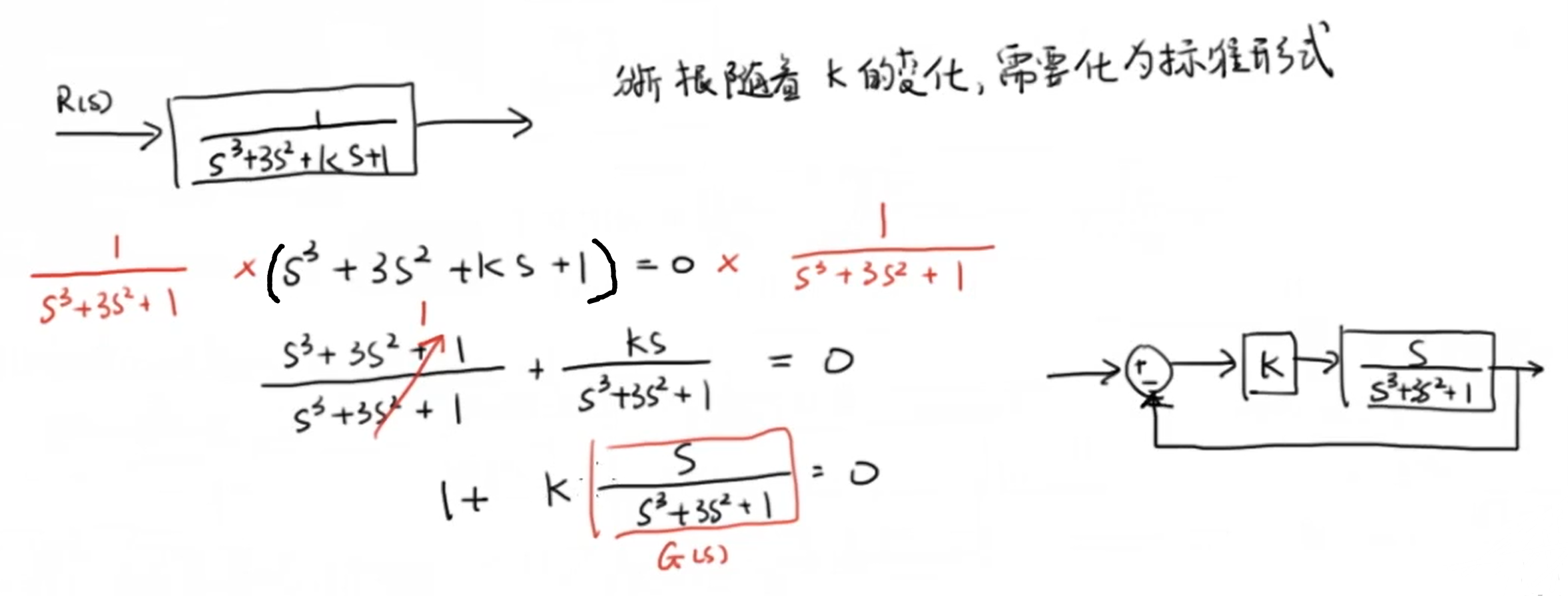
如果我们有的是闭环传递函数,则我们需要将其化为标准形式,即化成 (1+C(s)G(s)H(s)) ,然后提取出 (G(s) H(s)):
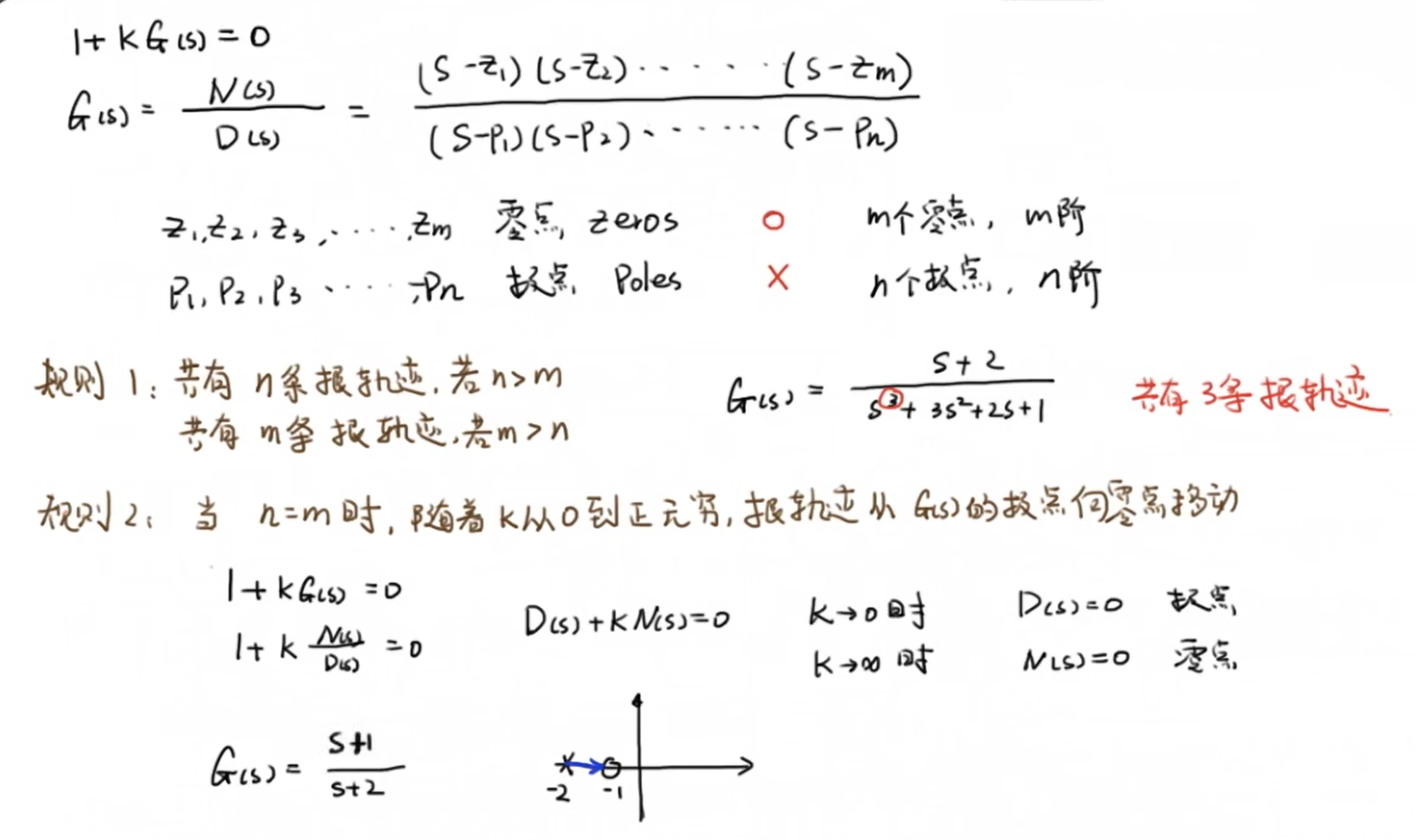
2 基本规则
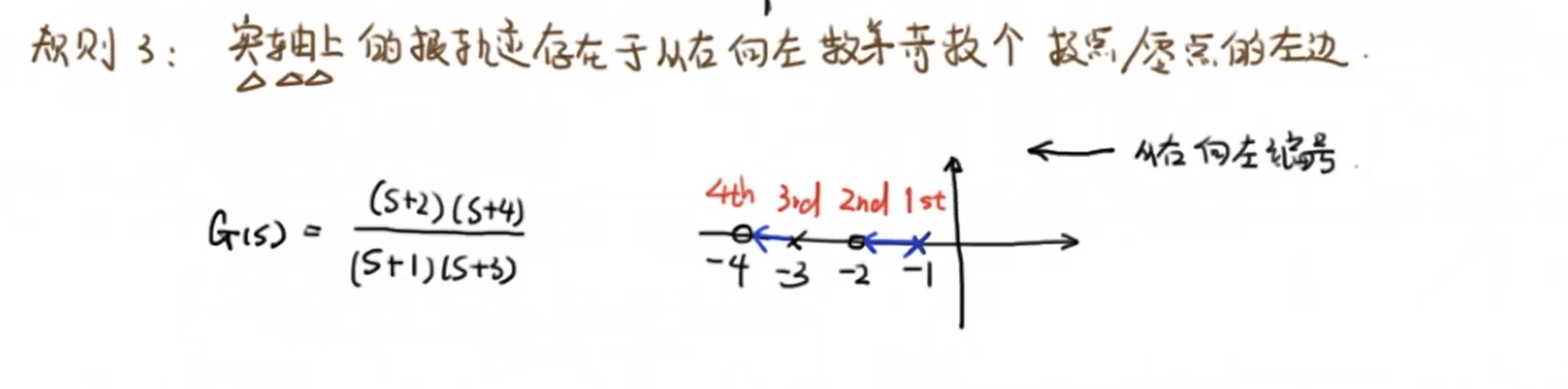
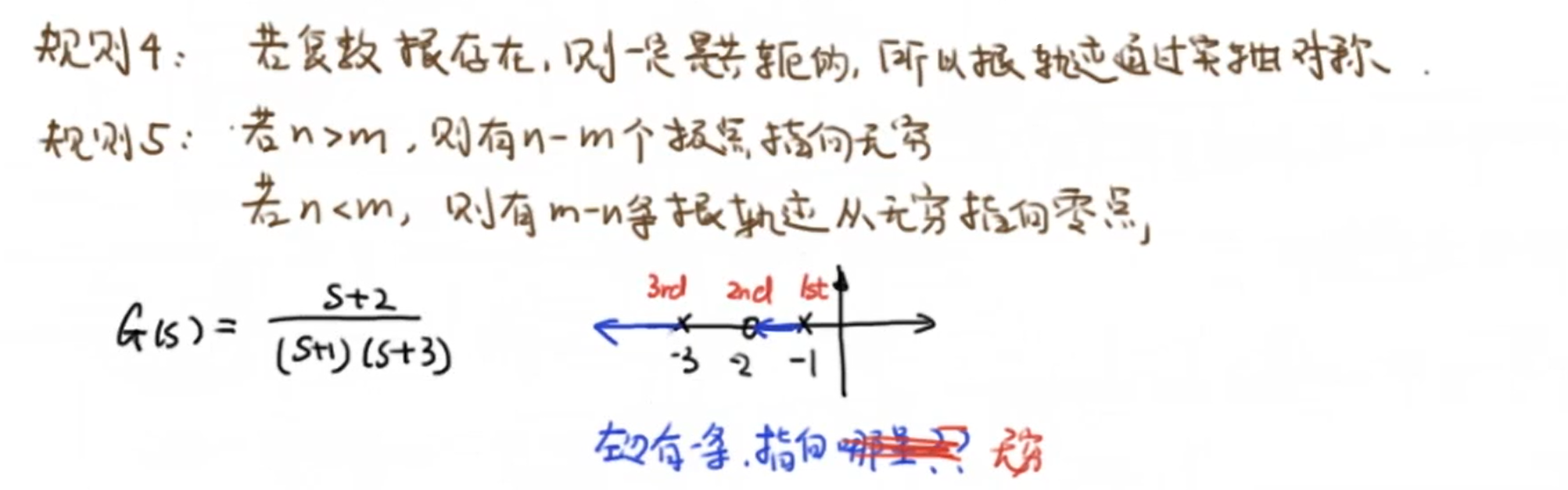
板书中写的很明确了这里不再赘述:
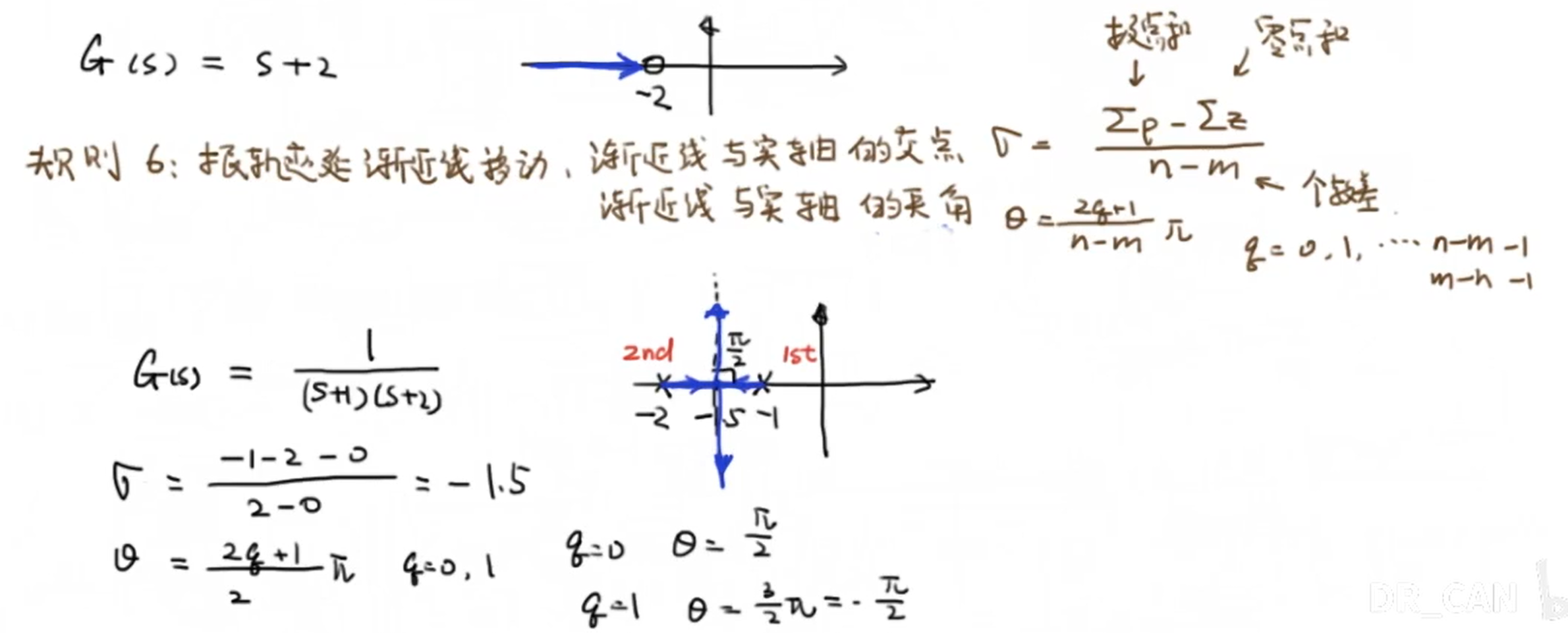
规则6的一个例子:
值得注意的是,根据以上六个规则,-2和-3两个极点的根轨迹会在某一点汇合,然后根据渐近线再分离,这个点我们叫做分离点。
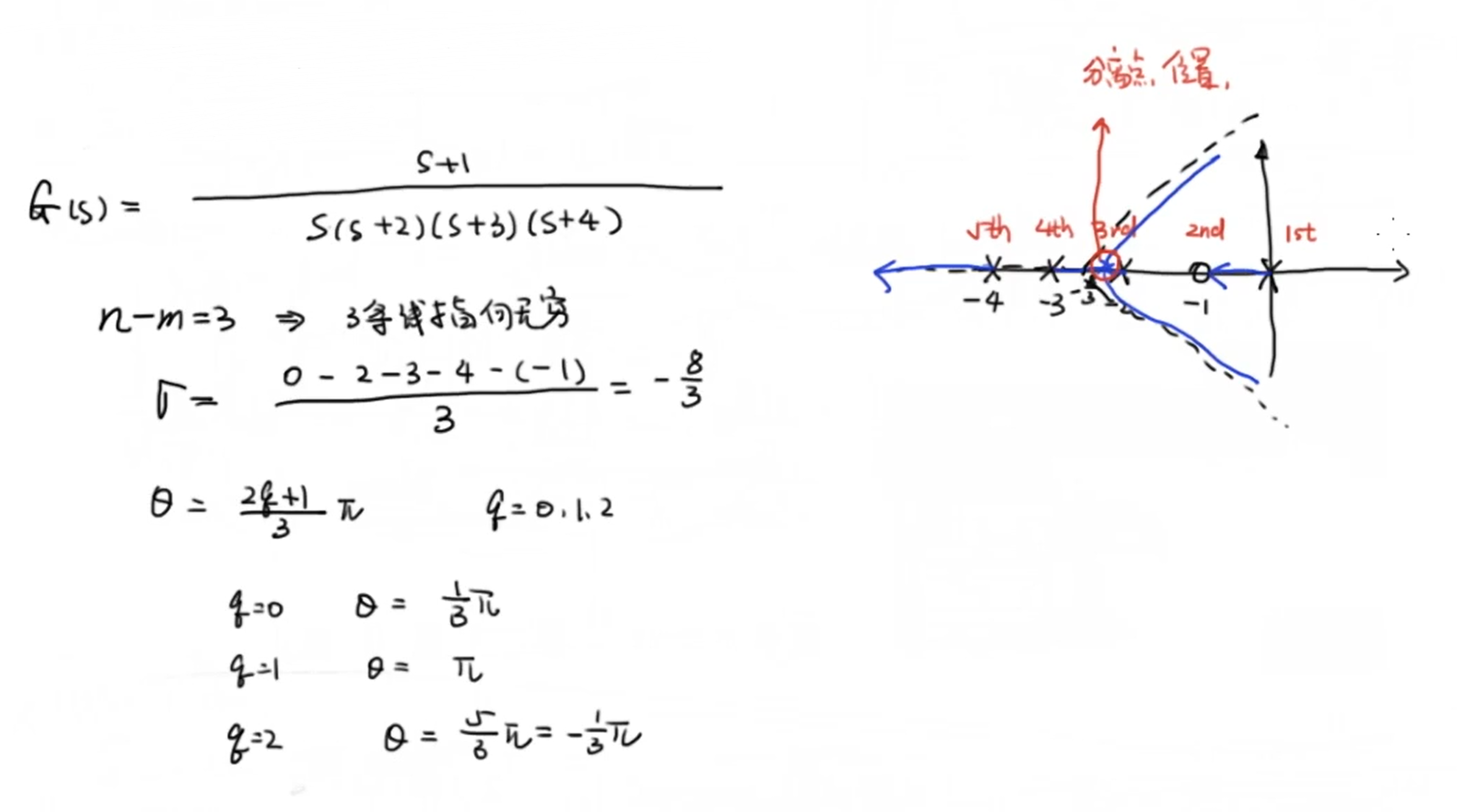
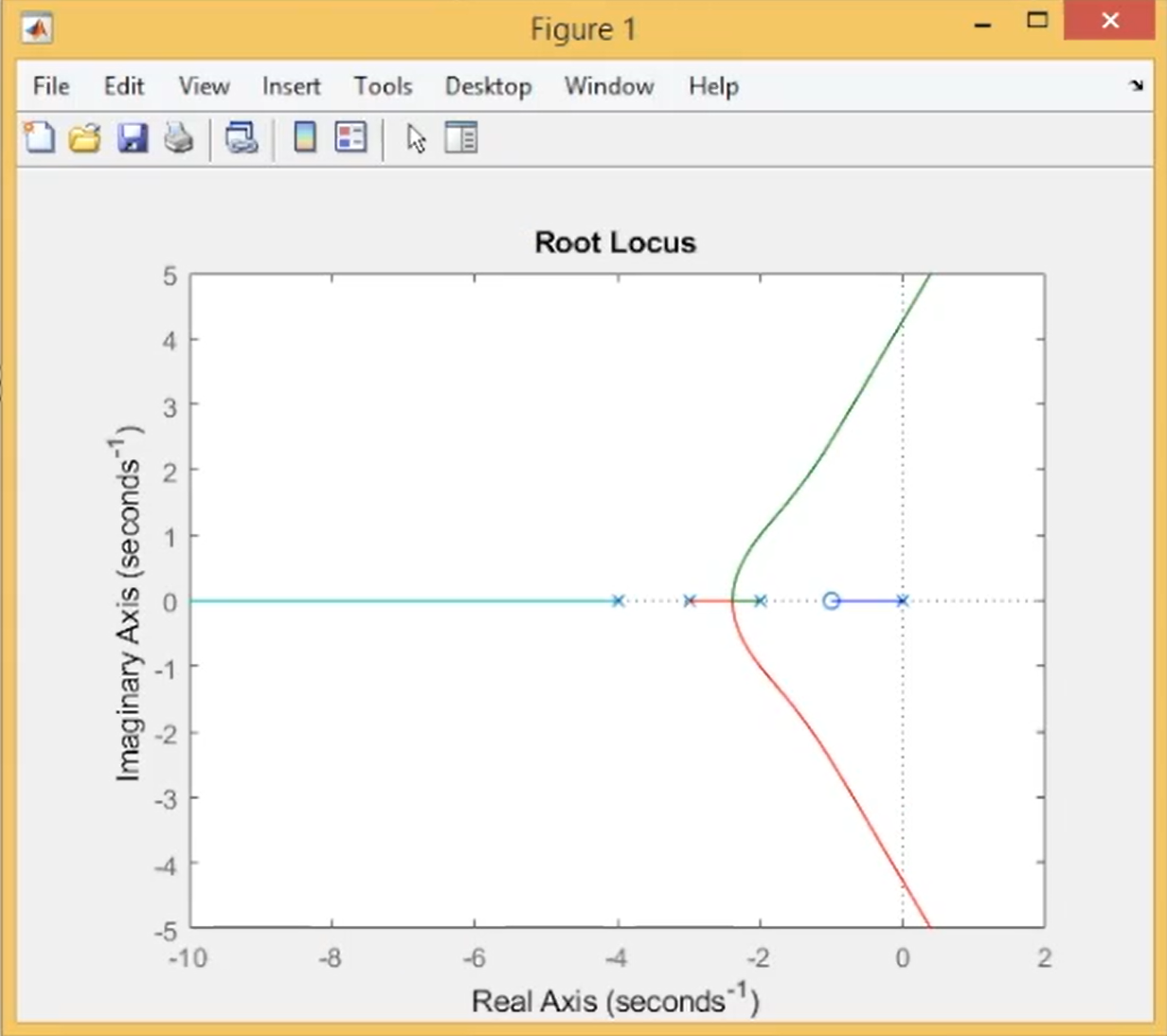
在matlab中绘制这个传递函数的根轨迹结果如下: