该系列为DR_CAN自动控制原理视频笔记,详见https://space.bilibili.com/230105574
由于笔者水平有限,文中难免存在一些不足和错误之处,诚请各位批评指正。
1 稳态误差
在稳定系统达到稳态时,稳态值与参考值之间的差值我们称为稳态误差:
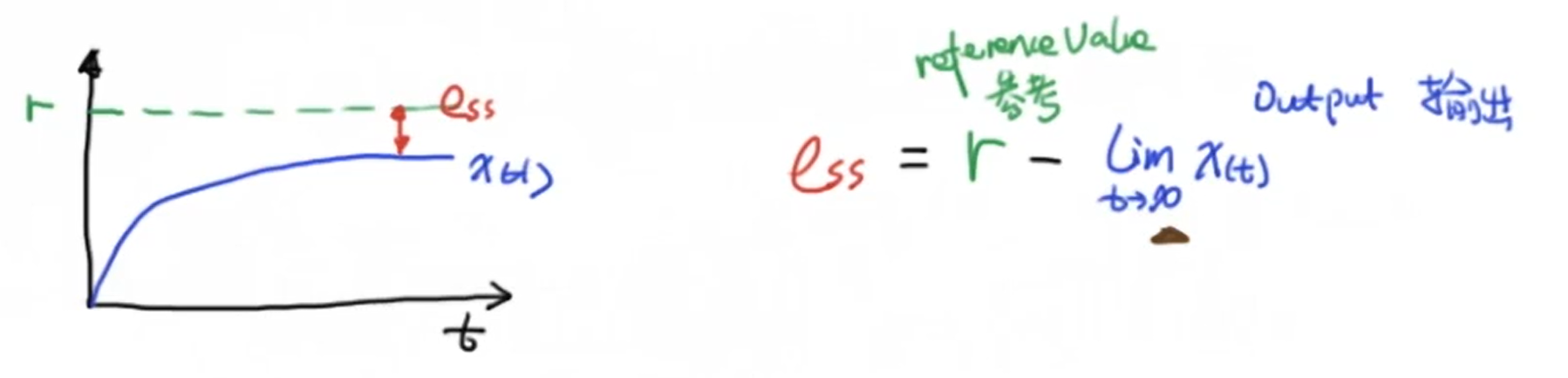
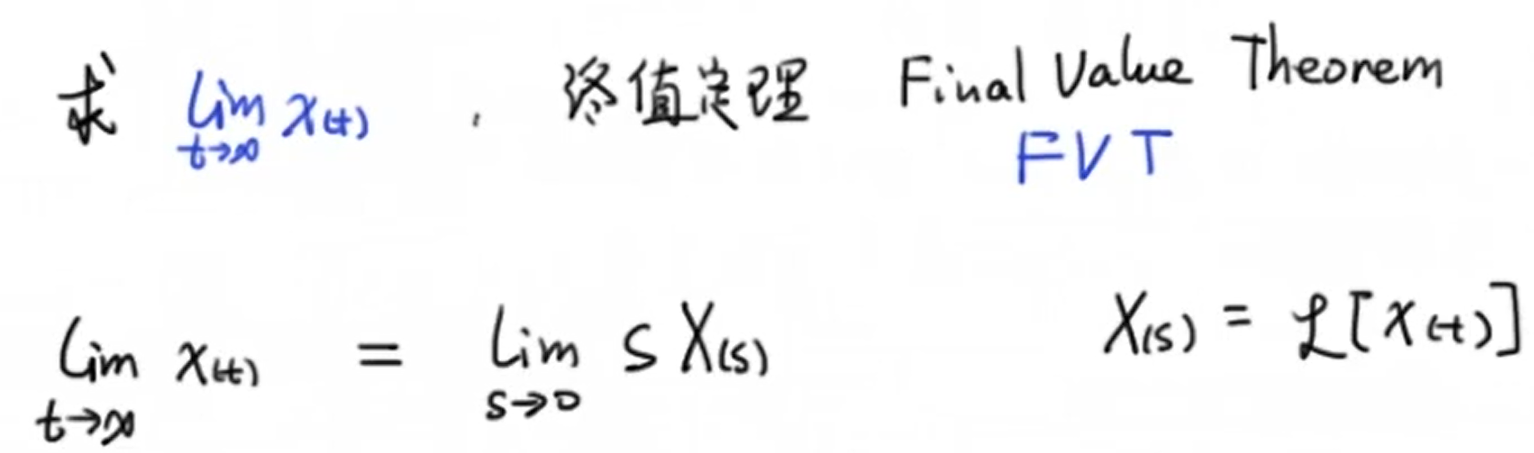
2 终值定理
要分析计算稳态误差,我们需要计算 (lim _{t ightarrow infty} x_{(t)}) ,考虑到我们对系统输出 (X(s)) 比 (x(t)) 更加熟悉,因此我们可以通过 (X(s)) 的极限来求解 (lim _{t ightarrow infty} x_{(t)}) ,这就需要终值定理(Final Value Theorem):
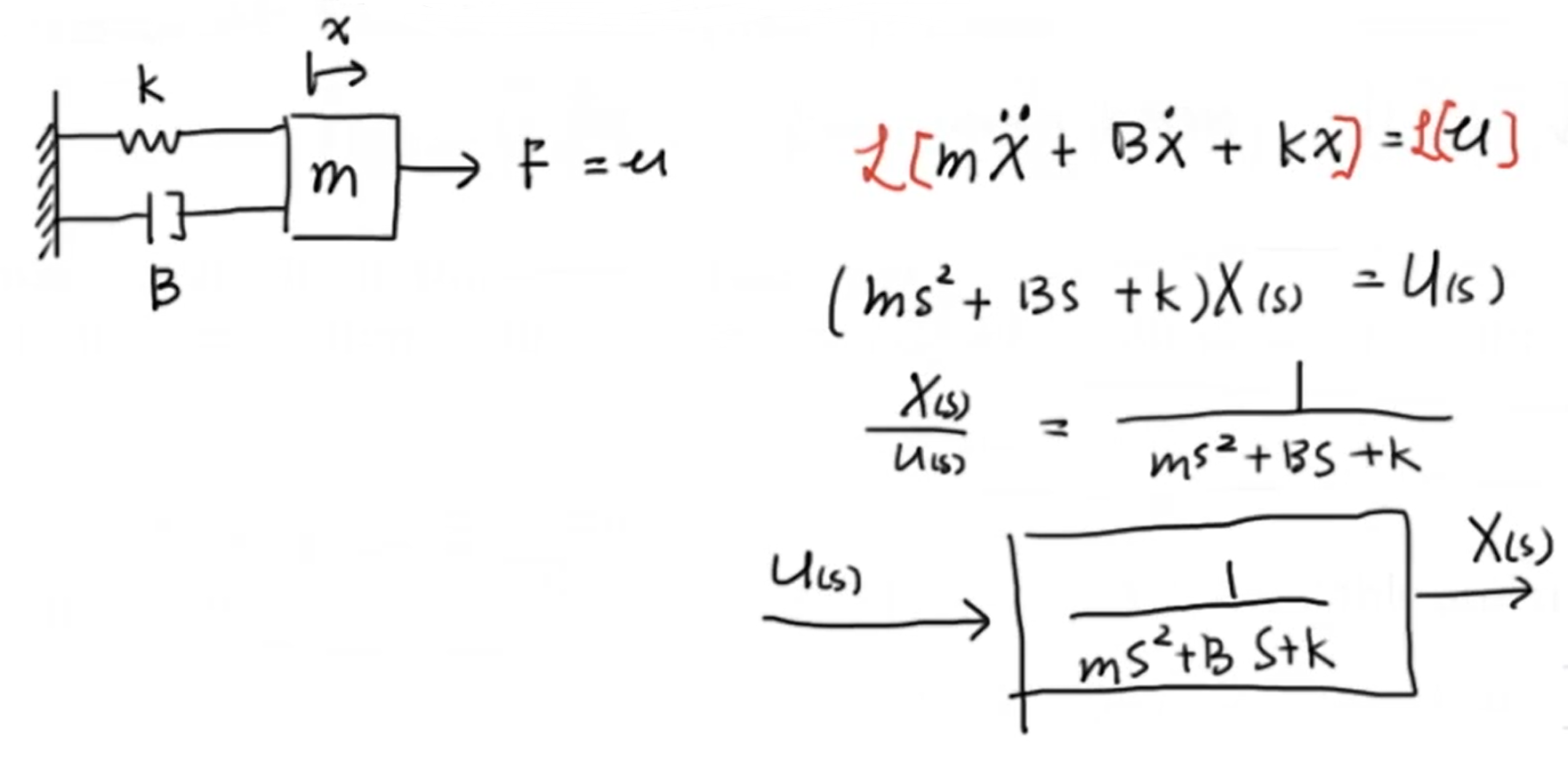
3 弹簧阻尼系统的例子
还是我们熟悉的味道:
以冲激响应和阶跃响应为例:
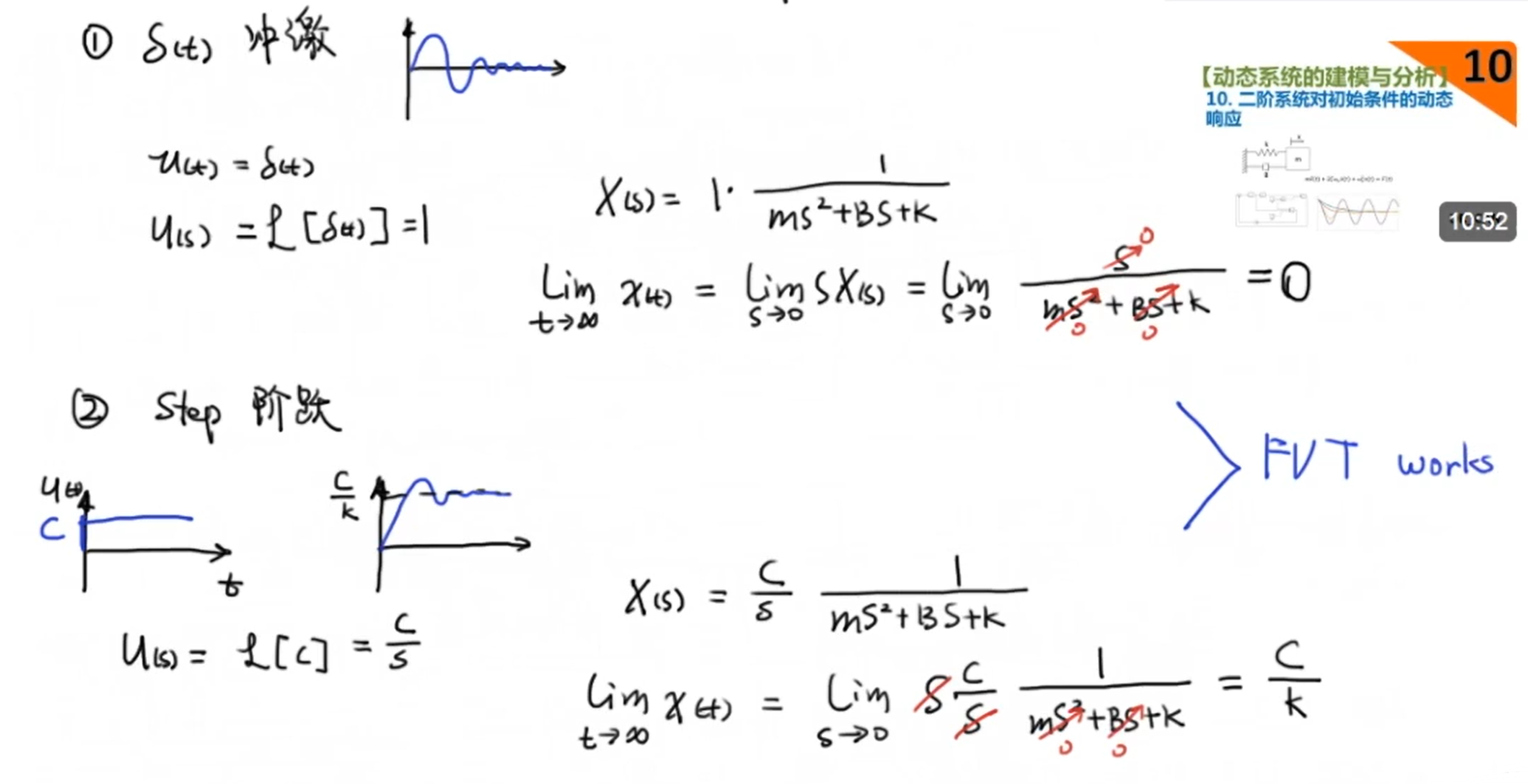
以上两种情况下终值定理是成立的,但是终值定理的成立是有条件的,那就是这个系统需要是稳定的,数学描述就是:

这个也很好理解,系统首先要是稳定的才有所谓的终值才有所谓的稳态误差。
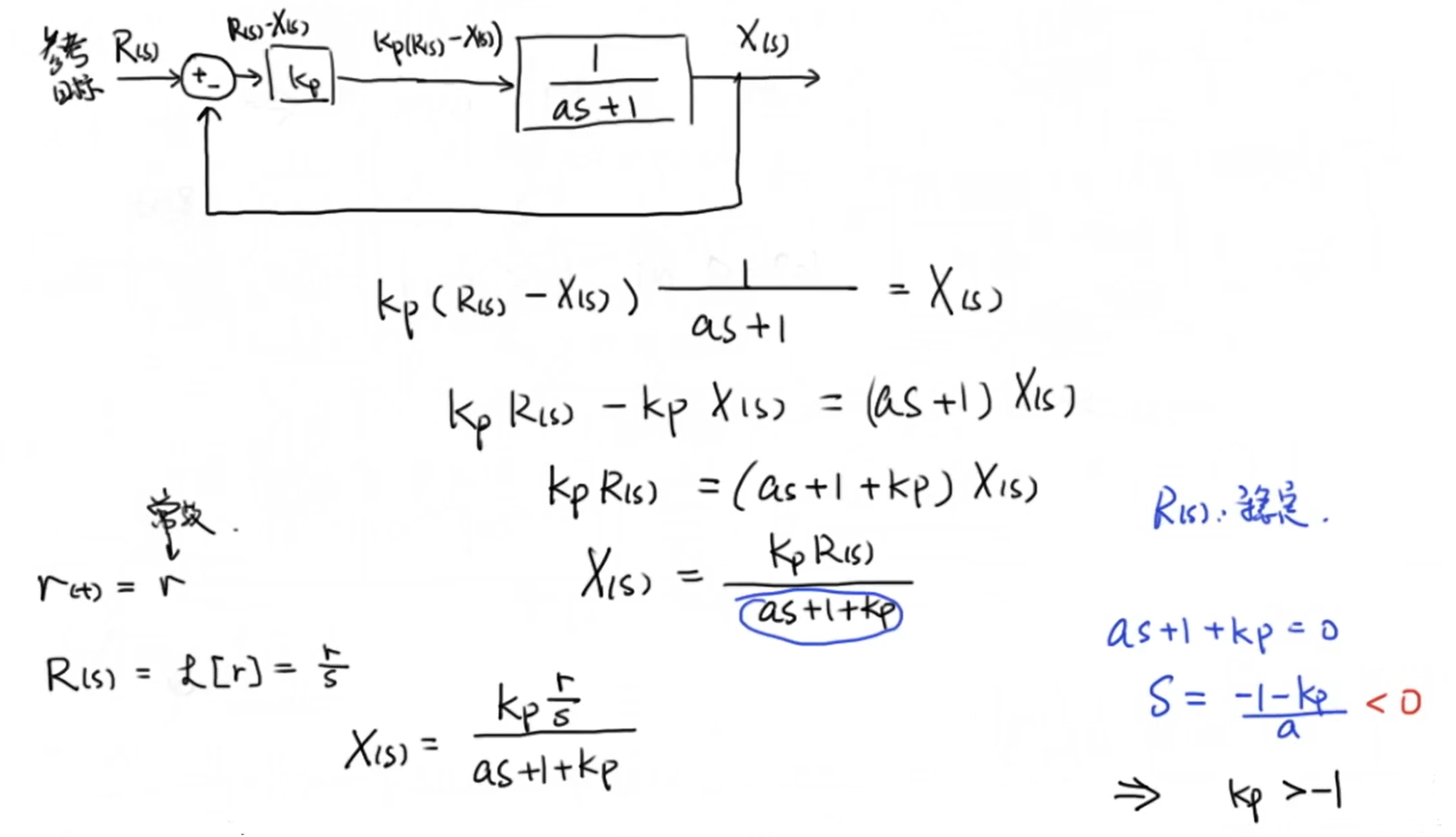
4 终值定理分析比例控制的稳态误差
在上一篇中我们发现对体重系统进行比例控制时,比例控制器并不能消除稳态误差,下面从数学的角度分析这种现象,首先计算系统输出 (X(s)) ,然后计算Kp决定的系统的收敛域,然后就可以应用终值定理了:
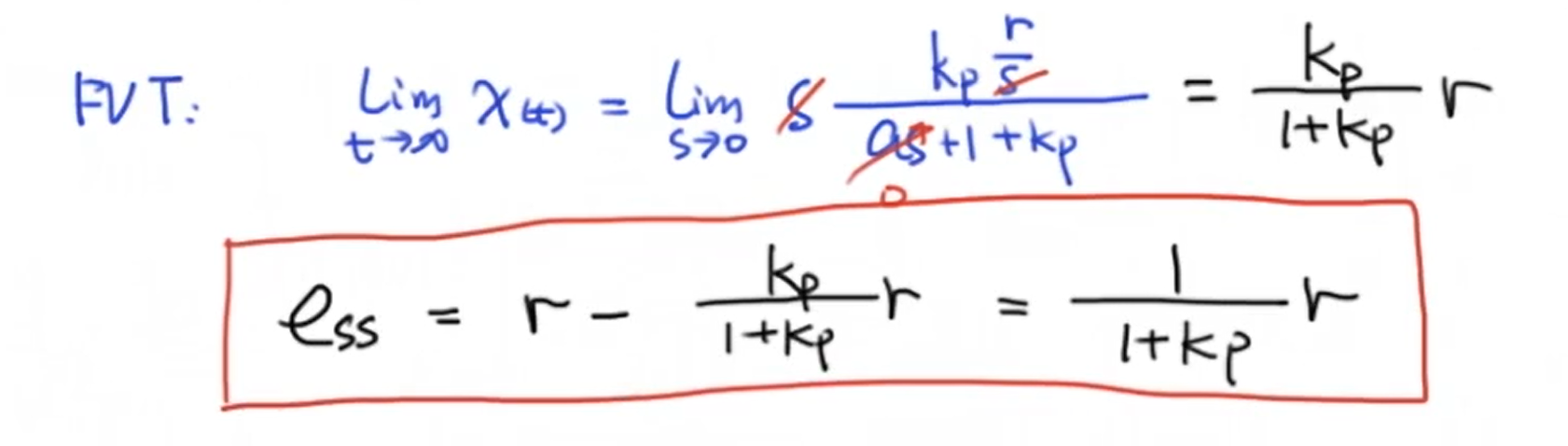
可以看到,当Kp越小时,稳态误差就越大。通过增大Kp来减小稳态误差理论上是可行的,但是由于过大的Kp会引起系统的超调。所以我们并不能无限制的增大Kp,因此我们就需要引入一个新的控制器——积分控制器。在下一篇会介绍PI控制器