【参考文章】
https://www.jianshu.com/p/df0d7d6571de
http://ifeve.com/introduce-abstractqueuedsynchronizer/
【 AbstractQueuedSynchronizer概述 】
AbstractQueuedSynchronizer,队列同步器,简称AQS,基于FIFO,是Java并发用来构建锁或者其他同步组件的基础框架。
一般使用AQS的主要方式是继承,子类通过实现它提供的抽象方法来管理同步状态(同步器用了一个int值来表示状态),主要管理的方式是通过tryAcquire()和tryRelease()类似的方法来操作状态,同时AQS提供以下线程安全的方式来对状态进行操作:
protected final int getState(); protected final void setState(int newState); protected final boolean compareAndSetState(int expect, int update);
【AQS主要是怎么使用的呢?】
在Java的同步组件中,AQS的子类一般是同步组件的静态内部类。
【AQS和同步组件的关系】
AQS是实现同步组件的关键,它两的关系:
同步组件是面向使用者的,它定义了使用者与组件交互的接口,隐藏了具体的实现细节。
AQS面向的是同步组件的实现类,它简化了具体的实现方式,屏蔽了线程切换相关的底层操作。
它俩一起很好地对使用者和是实现者锁关注的领域做了一个隔离。
【AQS实现分析】
【同步队列分析】
AQS的实现以来内部的同步队列(FIFO双向队列)来完成同步状态的管理,如果当前线程获取同步状态(锁)失败,AQS会将该线程以及等待状态能信息构造成一个Node,如下:
Node node = new Node(Thread.currentThread(), mode);
并将其加入同步队列,同时阻塞当前线程。当同步状态释放时候,唤醒队列的首节点。
【Node】
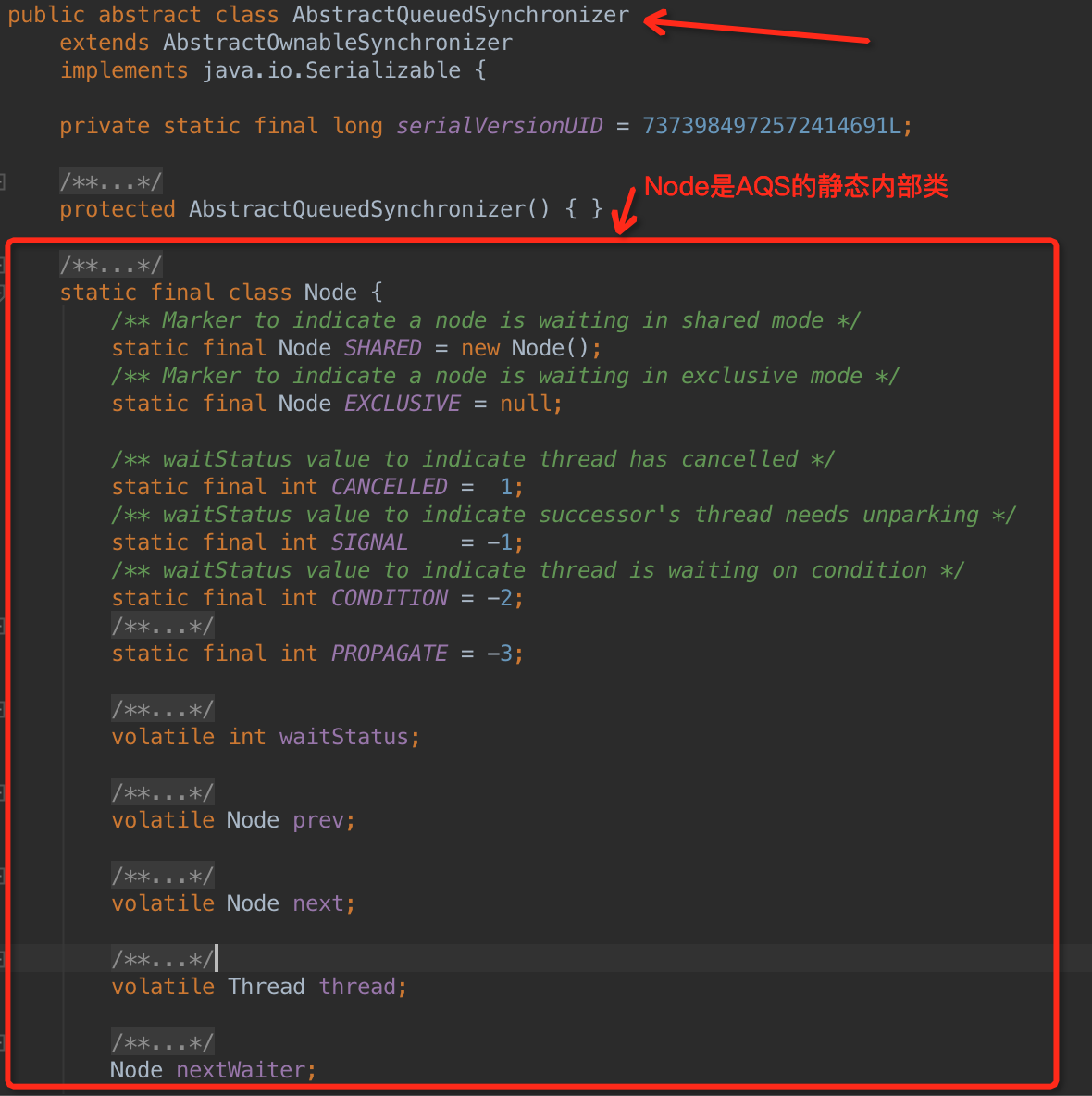
Node主要包含以下成员变量
static final class Node { volatile int waitStatus; volatile Node prev; volatile Node next; volatile Thread thread; Node nextWaiter; }
[ Node成员变量—— waitStatus ]
Node是AbstractQueuedSynchronizer中的一个静态内部类。
表示节点的状态
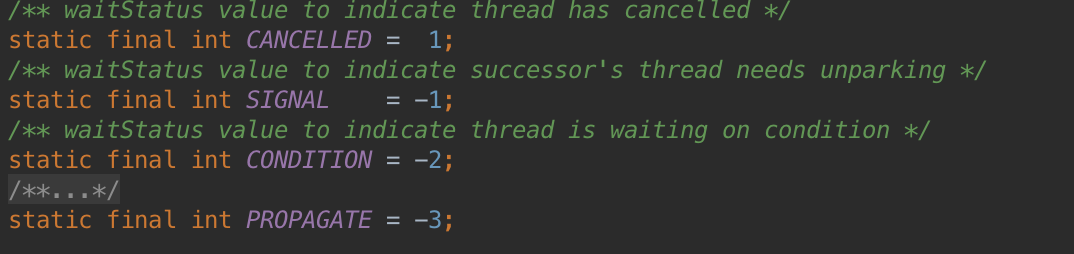
CANCELLED: 1,当前线程被取消 SIGNAL: -1,当前节点的后继节点包含的线程需要运行,即unpark CONDITION,-2,当前节点在等待condition,即在condition队列中 PROPAGETE:-3,当前场景下后续的acquireShared能够可以执行 0:当前节点在sync队列中,等待着获取锁
[ Node成员变量 —— prev ]
前驱节点,如果当前节点被取消,那就需要前驱节点和后继节点完成连接。
[ Node成员变量 —— next ]
后继节点。
[ Node成员变量 —— thread ]
入队时的当前线程。
[ Node成员变量 —— nextWaiter ]
存储condition队列中的后继节点。
Node节点成为sync队列和condition队列构建的基础。在AQS中就拥有了三个成员变量。
【 AQS成员变量 】
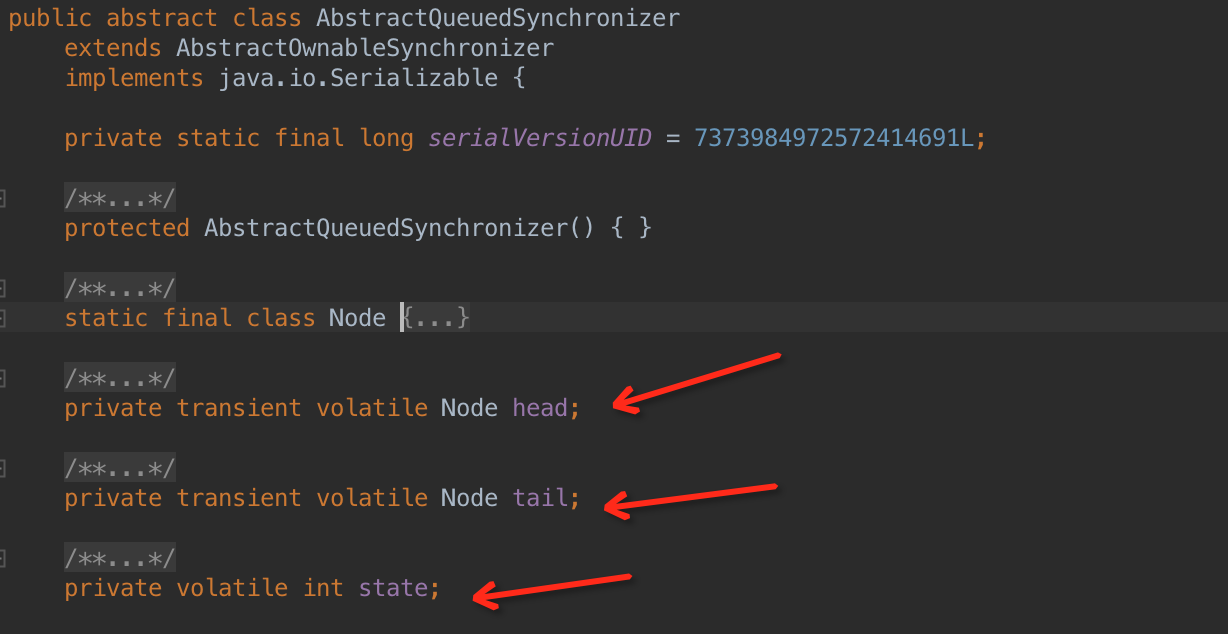
对于锁的获取,请求形成节点,将其挂载在尾部,而锁资源的转移(释放再获取)是从头部开始遍历向尾部进行的。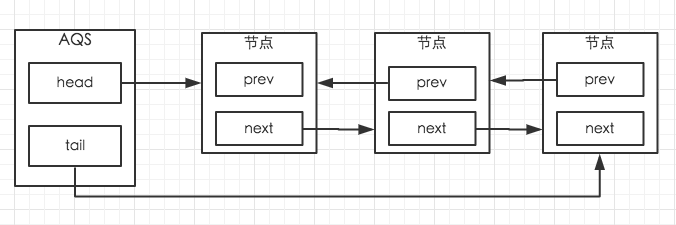
[ AQS 插入节点 ]
节点插入,AQS提供基于CAS的设置尾部节点的方法,如下:

参数:需要传递当前线程认为的尾节点和当前节点,设置成功后,当前节点和尾节点建立关系。

[ AQS 删除节点 ]
同步队列遵循FIFO,首节点是获取同步状态成功的节点,首节点的线程在释放同步状态之后将会唤醒其后继节点,后继节点将会获取同步状态成功的时候将自己设置为首节点。
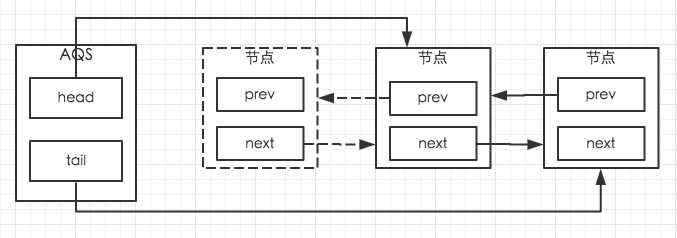
注意:设置首节点是由获取同步状态成功的线程来完成,因为每次只有一个线程能获取到同步状态,所以,设置首节点并不需要CAS来保证。
【AQS的API说明】
| 方法名称 | 描述 |
| protected boolean tryAcquire(int arg) | 排它地获取这个状态。这个方法的实现需要查询当前的同步状态是否允许获取,然后再进行获取(使用compareAndSetState来做)状态。 |
| protected boolean tryRelease(int arg) | 释放状态。 |
| protected int tryAcquireShared(int arg) | 共享的模式下获取同步状态。 |
| protected boolean tryReleaseShared(int arg) | 共享的模式下释放同步状态。 |
| protected boolean isHeldExclusively() | 在排它模式下,同步状态是否被占用。 |
【 AQS源码分析——acquire( int arg )方法 】
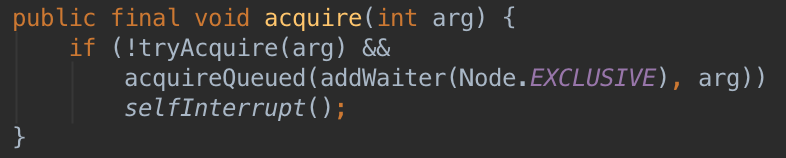
[执行流程]
1.调用tryAcquire(arg)方法尝试获取同步状态(锁)。
2.如果获取不到同步状态,将当前线程构造成Node节点并加入同步队列。
3.再次尝试获取,如果还是没有获取到,那么将当前线程从调度器上摘下,进入等待状态。
[ acquire( int arg )-->addWaiter(Node node) 方法]
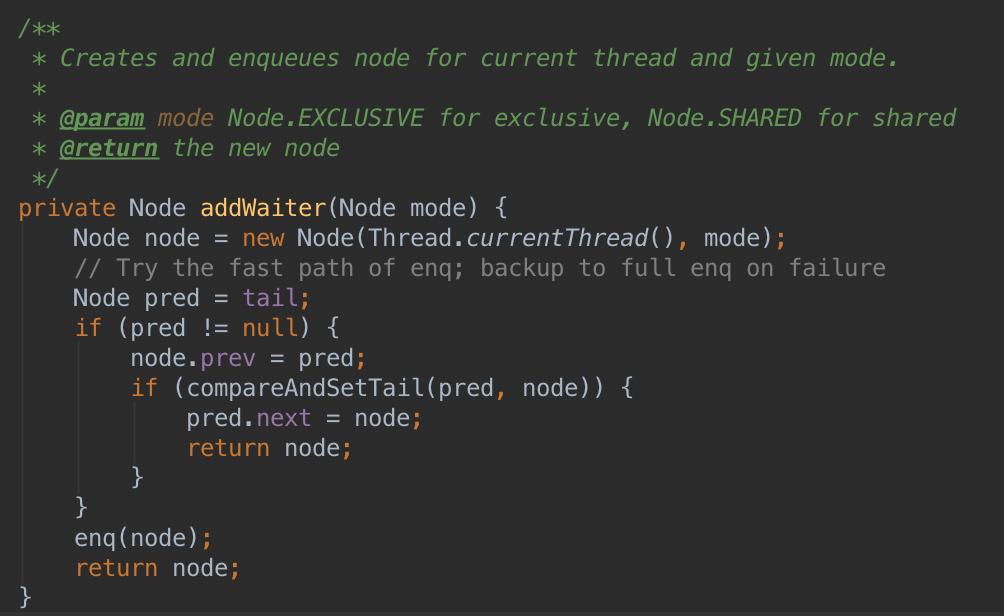
1.使用当前的Thread构造Node。
2.尝试在队尾插入节点,如果节点已经存在,就做以下操作:
- 分配引用T指向尾节点; - 将待插入节点的prev指针指向尾节点; - 如果尾节点还为T,将当前尾节点设置为带待插入节点; - T的next指针指向待插入节点。
3.快速在队尾插入节点,失败则进入enq(Node node)方法。
[ acquire( int arg ) --> addWaiter(Node node) --> enq(Node node) 方法]
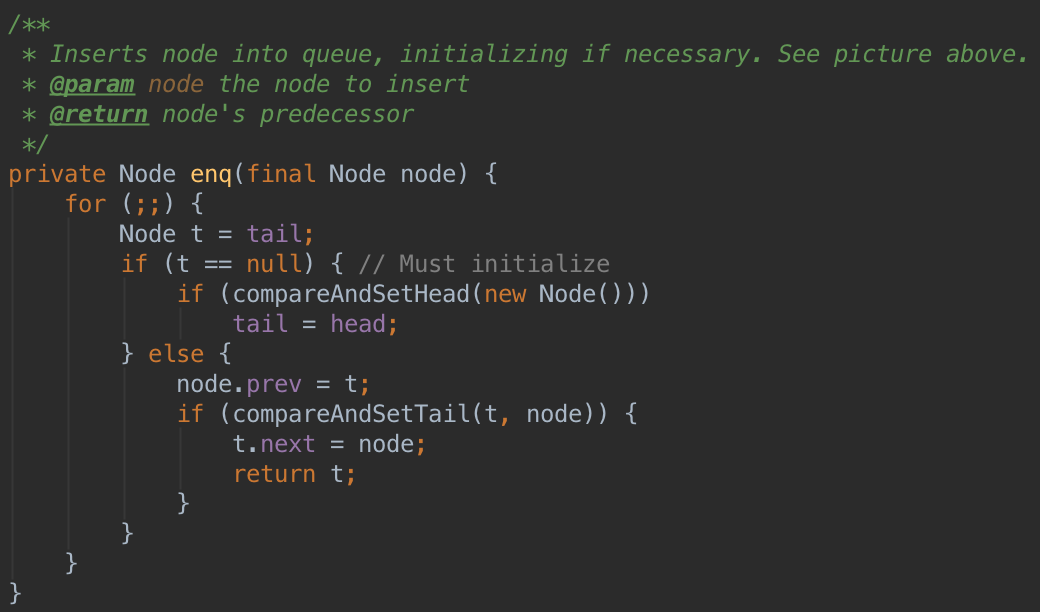
enq(Node node)的逻辑可以确保Node可以有顺序地添加到同步队列中,具体的加入逻辑如下:
1.初始化同步队列,如果尾节点为空,分配一个头结点,并将尾节点指向头结点。
2.节点入队,通过CAS将节点设置为尾节点,以此在队尾做节点插入。
可以看出,整个enq(Node node)方法通过“死循环”来保证节点的正确插入。
进入同步队列之后,接下来就是同步状态的获取,或者说是访问控制acquireQueued。对于同步队列中的线程,在同一时刻只能由队列首节点获取同步状态,其他的线程进入等待,只到符合条件才能继续进行。
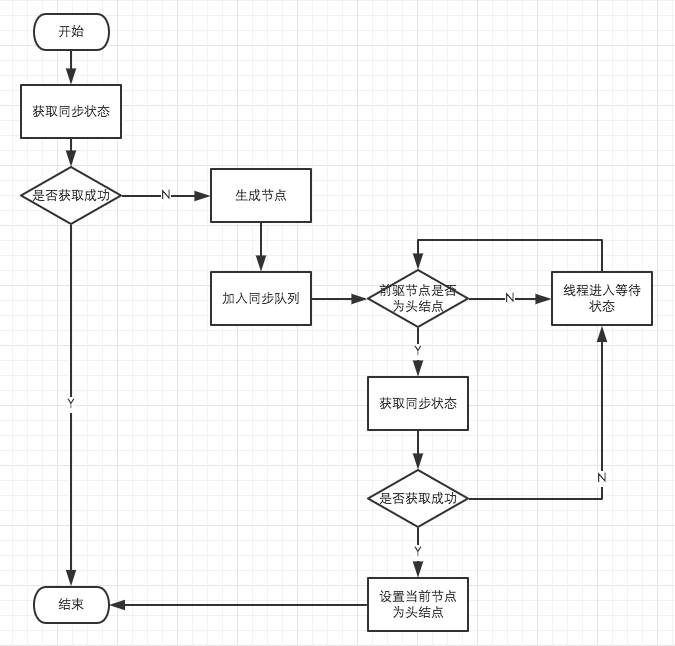
[ acquire( int arg )--> acquireQueued(Node node , int arg)方法 ]
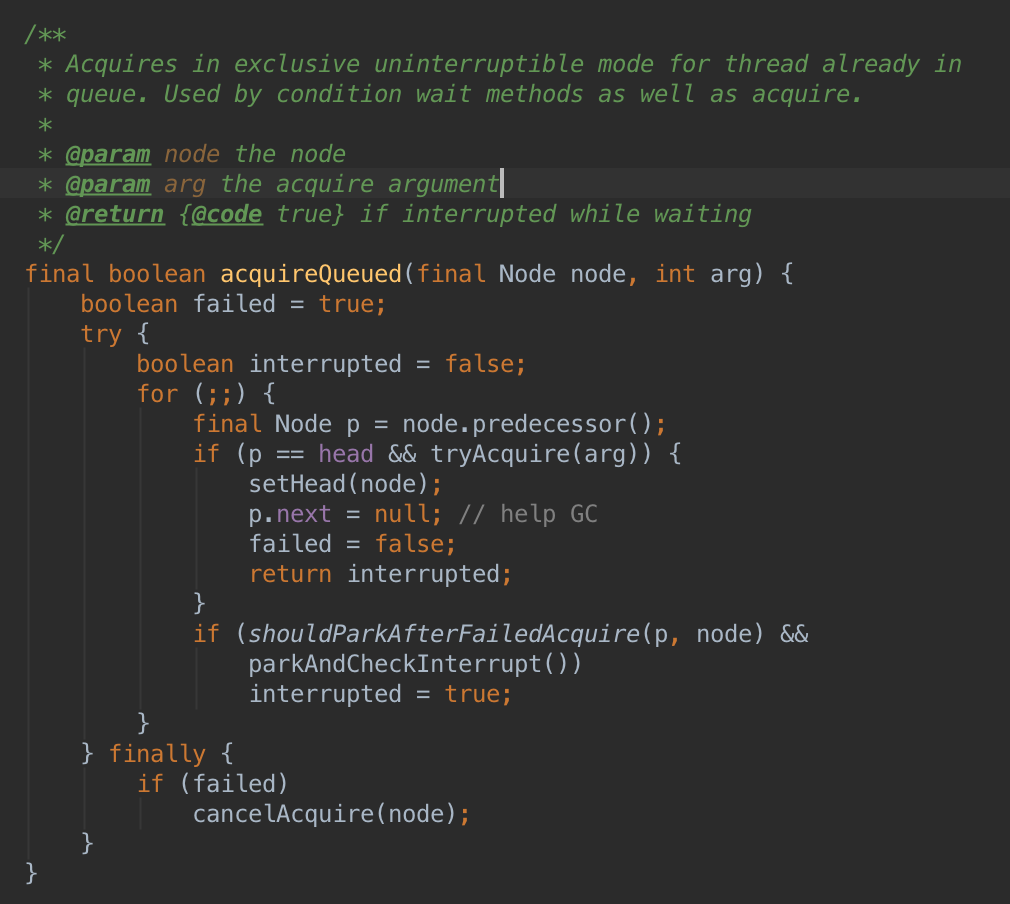
1.获取当前节点的前驱节点
2.如果当前节点的前驱节点是头节点,并且可以获取同步状态(锁),设置当前节点为头结点,该节点占有锁。
3.不满足条件的线程进入等待状态。
整个方法中,当前线程一直在“死循环”中获取同步状态。
节点自旋获取同步状态,如下图:

从代码的逻辑也可以看出,其实节点与节点之间在循环检查的过程中,是不会相互通信的,仅仅只是判断自己当前的前驱节点是不是头结点,这样的设计使得节点的释放符合FIFO,同时也避免了过早通知。
注意:过早通知是指 前驱节点不是头结点的线程由于终端而被唤醒。
[ acquiure()实现总结 ]
1.同步状态维护
对同步状态的操作是原子、非阻塞的,通过AQS提供的对状态访问的方法来对同步状态进行操作,并且利用CAS来确保原子操作。
2.状态获取
一旦线程成功地修改了同步状态,那么该线程会被设置为同步队列的头结点。
3.同步队列维护
不符合同步状态的线程会进入等待状态,直到符合条件被唤醒再开始执行。