一、API调用过程(3环部分)
什么是API?
API,Application Programming Interface 应用程序接口,操作系统的API主要放在C:WINDOWSsystem32 。绝大多数的API都是在Ring0实现的,极少数是在3环,3环只是提供一个接口。
几个重要的DLL
1、Kernel32.dll
最核心的功能模块:如管理内存、进程、线程相关函数
2、User3.dll
是Windows用户界面相关应用程序接口,如创建窗口和发送消息
3、GDI32.dll
Graphical Device Interface,图形设备接口,包含用于画图和显示文本的函数:如要显示一个程序窗口
4、Ntdil.dll
大多数API都会通过这个DLL进入内核
IDA分析ReadProcessMemory API
1、Kernel32.dll中搜索ReadProcessMemory
//5个参数压栈
.text:7C8021D0 ProcessHandle = dword ptr 8
.text:7C8021D0 BaseAddress = dword ptr 0Ch
.text:7C8021D0 Buffer = dword ptr 10h
.text:7C8021D0 BufferLength = dword ptr 14h
.text:7C8021D0 lpNumberOfBytesRead= dword ptr 18h
.text:7C8021D0
.text:7C8021D0 mov edi, edi
.text:7C8021D2 push ebp
.text:7C8021D3 mov ebp, esp
.text:7C8021D5 lea eax, [ebp+BufferLength]
.text:7C8021D8 push eax ; ReturnLength
.text:7C8021D9 push [ebp+BufferLength] ; BufferLength
.text:7C8021DC push [ebp+Buffer] ; Buffer
.text:7C8021DF push [ebp+BaseAddress] ; BaseAddress
.text:7C8021E2 push [ebp+ProcessHandle] ; ProcessHandle
.text:7C8021E5 call ds:NtReadVirtualMemory ;核心功能在这里
.text:7C8021EB mov ecx, [ebp+lpNumberOfBytesRead]
.text:7C8021EE test ecx, ecx
.text:7C8021F0 jnz short loc_7C8021FD
.text:7C8021F2
.text:7C8021F2 loc_7C8021F2: ; CODE XREF: ReadProcessMemory+32j
.text:7C8021F2 test eax, eax
.text:7C8021F4 jl short loc_7C802204 ;小于0则跳转
.text:7C8021F6 xor eax, eax
.text:7C8021F8 inc eax
.text:7C8021F9
.text:7C8021F9 loc_7C8021F9: ; CODE XREF: ReadProcessMemory+3Cj
.text:7C8021F9 pop ebp
.text:7C8021FA retn 14h
.text:7C8021FD ; ---------------------------------------------------------------------------
.text:7C8021FD
.text:7C8021FD loc_7C8021FD: ; CODE XREF: ReadProcessMemory+20j
.text:7C8021FD mov edx, [ebp+BufferLength]
.text:7C802200 mov [ecx], edx
.text:7C802202 jmp short loc_7C8021F2
.text:7C802204 ; ---------------------------------------------------------------------------
.text:7C802204
.text:7C802204 loc_7C802204: ; CODE XREF: ReadProcessMemory+24j
.text:7C802204 push eax ; NtStatus
.text:7C802205 call sub_7C8093FD
.text:7C80220A xor eax, eax
.text:7C80220C jmp short loc_7C8021F9
2、参数压栈后,调用了另外一个函数,返回结果在eax中,小于0的话就跳到这里
ReadProcessMemory+24j
.text:7C802204 push eax
.text:7C802205 call sub_7C8093FD ;这是一个API用于设置错误号
.text:7C80220A xor eax, eax
.text:7C80220C jmp short loc_7C8021F9
3、Call一个用于设置错误号(BaseSetLastNTError )函数,将eax清0后,又跳回去。
.text:7C8021F9
.text:7C8021F9 loc_7C8021F9: ; CODE XREF: ReadProcessMemory+3Cj
.text:7C8021F9 pop ebp
.text:7C8021FA retn 14h
跳到这,直接返回,所以失败返回的结果是0.
4、如果eax>0,eax清0,eax+1,返回1
分析完这个函数,发现:主要的功能实现全面在NtReadVirtualMemory 这个API里了。
我们先来看看NtReadVirtualMemory 在哪个DLL中。
打开导入表,发现在ntdll.dll里。
7C801418 NtReadVirtualMemory ntdll
在这个dll里搜索一下NtReadVirtualMemory
发现这个函数里也没什么实现细节,只是提供一个操作码,通过这种方式实现从3环进入0环,而真正的函数实现是在0环。
.text:7C92D9E0 mov eax, 0BAh ; NtReadVirtualMemory
.text:7C92D9E5 mov edx, 7FFE0300h ;决定了什么方式进0环
.text:7C92D9EA call dword ptr [edx]
.text:7C92D9EC retn 14h
我们自己在3环实现一个ReadProcessMemory ,自己实现的好处就在于 能够防止被人来通过API断点来分析我们的程序,对我们的程序进行hook检测。
具体的实现如下:
#include<windows.h>
#include<stdio.h>
void __declspec(naked) read(HANDLE hProcess,LPVOID addr,LPVOID buffer,DWORD len)
{
_asm
{
mov eax, 0BAh
mov edx, 7FFE0300h
call dword ptr[edx]
ret
}
}
int main(int argc, char* argv[])
{
HWND hwnd = FindWindow("#32770","xxx");
DWORD pid;
GetWindowThreadProcessId(hwnd,&pid);
HANDLE hProcess = OpenProcess(PROCESS_ALL_ACCESS, FALSE, pid);
DWORD val = 0;
read(hProcess,(LPVOID)0x001D6EBC,&val,4);
printf("val: %d", val);
getchar();
return 0;
}
(二)API调用过程(3环进0环)
1、_KUSER_SHARED_DATA 结构
在用户层和核心层分别定义了一个 _KUSER_SHARED_DATA 结构区域,用于用户层和内核层共享某些数据。
它们使用固定的地址值映射,_KUSER_SHARED_DATA 结构区域在用户层和内核层的线性地址分别为:
用户层: 0x7ffe0000
内核层: 0xffdf0000
这两个线性地址对应的物理页是一样的。如图在windbg里查看这两个地址的数据:

备注:虽然指向的是同一个物理页,但在User层是只读的,在Kernel层是可读可写的。
再来看看_KUSER_SHARED_DATA 这个结构,windbg 中输入 dt _KUSER_SHARED_DATA
0: kd> dt _KUSER_SHARED_DATA
nt!_KUSER_SHARED_DATA
+0x000 TickCountLow : Uint4B
+0x004 TickCountMultiplier : Uint4B
+0x008 InterruptTime : _KSYSTEM_TIME
+0x014 SystemTime : _KSYSTEM_TIME
+0x020 TimeZoneBias : _KSYSTEM_TIME
+0x02c ImageNumberLow : Uint2B
+0x02e ImageNumberHigh : Uint2B
+0x030 NtSystemRoot : [260] Uint2B
+0x238 MaxStackTraceDepth : Uint4B
+0x23c CryptoExponent : Uint4B
+0x240 TimeZoneId : Uint4B
+0x244 Reserved2 : [8] Uint4B
+0x264 NtProductType : _NT_PRODUCT_TYPE
+0x268 ProductTypeIsValid : UChar
+0x26c NtMajorVersion : Uint4B
+0x270 NtMinorVersion : Uint4B
+0x274 ProcessorFeatures : [64] UChar
+0x2b4 Reserved1 : Uint4B
+0x2b8 Reserved3 : Uint4B
+0x2bc TimeSlip : Uint4B
+0x2c0 AlternativeArchitecture : _ALTERNATIVE_ARCHITECTURE_TYPE
+0x2c8 SystemExpirationDate : _LARGE_INTEGER
+0x2d0 SuiteMask : Uint4B
+0x2d4 KdDebuggerEnabled : UChar
+0x2d5 NXSupportPolicy : UChar
+0x2d8 ActiveConsoleId : Uint4B
+0x2dc DismountCount : Uint4B
+0x2e0 ComPlusPackage : Uint4B
+0x2e4 LastSystemRITEventTickCount : Uint4B
+0x2e8 NumberOfPhysicalPages : Uint4B
+0x2ec SafeBootMode : UChar
+0x2f0 TraceLogging : Uint4B
+0x2f8 TestRetInstruction : Uint8B
+0x300 SystemCall : Uint4B
+0x304 SystemCallReturn : Uint4B
+0x308 SystemCallPad : [3] Uint8B
+0x320 TickCount : _KSYSTEM_TIME
+0x320 TickCountQuad : Uint8B
+0x330 Cookie : Uint4B
2、分析7FFE0300h进Ring0的方式
在之前分析的NtReadVirtualMemory中的代码如下:
.text:7C92D9E0 mov eax, 0BAh ; NtReadVirtualMemory
.text:7C92D9E5 mov edx, 7FFE0300h ;决定了什么方式进0环
.text:7C92D9EA call dword ptr [edx]
.text:7C92D9EC retn 14h
当通过eax=1来执行cpuid指令时,处理器的特征信息被放在ecx和edx寄存器中,其中edx包含了一个SEP位,该位处于第11位,指明了当前CPU是否支持 sysenter、sysexit 指令,如果支持说明支持快速调用。
当SEP=1时,表明支持快速调用 , ntdll.dll!KiFastSystemCall()
当SEP=0时,表明不支持快速调用,ntdll.dll!KiIntSystemCall()。

7FFE0300h决定了以什么样的方式进入Ring0,那么7FFE0300h到底是如何决定的呢?
接下来我们来拆解一下7FFE0300h:
7FFE0300
0111 1111 1111 1110 0000 0011 0000 0000
第11位是0,所以不支持快速调用。
进入0环需要修改的寄存器
1、CS的权限由Ring3->Ring0,CS会发生改变
2、SS与CS的权限一致
3、权限发生切换的时候,堆栈也一定会切换,需要新的ESP
4、进Ring0后的代码位置
3、两种进Ring0的方式
3.1 API通过中断门进Ring0
如上所示的7FFE0300h就不支持快速调用,那么这种情况该如何进内核呢?
我们可以通过中断门进Ring0:
.text:7C92E500 public KiIntSystemCall
.text:7C92E500 KiIntSystemCall proc near ; DATA XREF: .text:off_7C923428o
.text:7C92E500
.text:7C92E500 arg_4 = byte ptr 8
.text:7C92E500
.text:7C92E500 lea edx, [esp+arg_4] ;edx是参数指针,系统调用号在eax寄存器
.text:7C92E504 int 2Eh ; DOS 2+ internal - EXECUTE COMMAND
.text:7C92E504 ; DS:SI -> counted CR-terminated command string
.text:7C92E506 retn
.text:7C92E506 KiIntSystemCall endp
eax里的值是内核操作码,edx存的是参数的指针,api统一中断号0x2e,因为idt表在2e的位置。
3.2 通过int 0x2e进Ring0
具体步骤如下:
1、在IDT表中找到0x2e号的描述符
2、分析CS/SS/ESP/EIP的来源
3、分析EIP是什么
通过 >dq idtr L30 找到0x2e处的描述符,如图所示:
0: kd> dq idtr L30
8003f400 80548e00`000831a0 80548e00`0008331c
8003f410 00008500`0058113e 8054ee00`00083730
8003f420 8054ee00`000838b0 80548e00`00083a10
8003f430 80548e00`00083b84 80548e00`000841fc
8003f440 00008500`00501198 80548e00`00084600
8003f450 80548e00`00084720 80548e00`00084860
8003f460 80548e00`00084ac0 80548e00`00084dac
8003f470 80548e00`000854a8 80548e00`000857e0
8003f480 80548e00`00085900 80548e00`00085a3c
8003f490 80548500`00a057e0 80548e00`00085ba4
8003f4a0 80548e00`000857e0 80548e00`000857e0
8003f4b0 80548e00`000857e0 80548e00`000857e0
8003f4c0 80548e00`000857e0 80548e00`000857e0
8003f4d0 80548e00`000857e0 80548e00`000857e0
8003f4e0 80548e00`000857e0 80548e00`000857e0
8003f4f0 80548e00`000857e0 806e8e00`0008710c
8003f500 00000000`00080000 00000000`00080000
8003f510 00000000`00080000 00000000`00080000
8003f520 00000000`00080000 00000000`00080000
8003f530 00000000`00080000 00000000`00080000
8003f540 00000000`00080000 00000000`00080000
8003f550 8054ee00`000829ce 8054ee00`00082ad0
8003f560 8054ee00`00082c80 8054ee00`0008360c
8003f570 8054ee00`00082451 80548e00`000857e0
如图所示的最后一行的位置:8054ee00`00082451
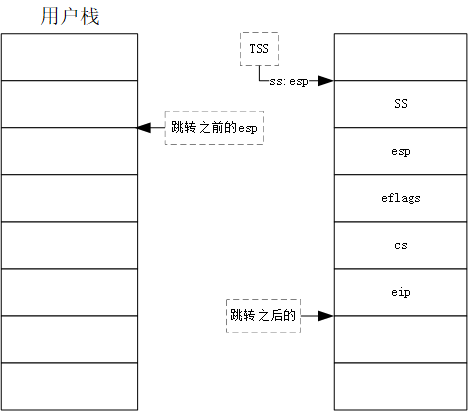
0008就是CS,高4字节+低4字节就是EIP:80542451 ,SS和ESP是TSS提供的,如图所示:
通过 >u 80542451 查看反汇编,如图:
0: kd> u 80542451
nt!KiSystemService:
EIP:KiSystemService(),这个函数在内核模块里:
1、固定中断号为0x2e
2、CS/EIP由门描述符提供,ESP/SS由TSS提供
3、进入Ring0后执行内核函数: NT!KiSystemService
4、通过iret/iretd指令返回到用户模式
3.3 sysenter进Ring0
通过快速调用进Ring0,分析KiFastSystemCall()函数
.text:7C92E4F0 public KiFastSystemCall
.text:7C92E4F0 KiFastSystemCall proc near ; DATA XREF: .text:off_7C923428o
.text:7C92E4F0 mov edx, esp ;edx 3环栈顶,系统调用号在eax寄存器
.text:7C92E4F2 sysenter ;寄存器数据传递
.text:7C92E4F2 KiFastSystemCall endp ; sp-analysis failed
eax是操作码,edx是返回地址以及参数的指针。
1、为什么叫快速调用
中断门进Ring0需要CS、EIP在IDT表中,需要查内存。
假设CPU支持sysenter指令时,OS会提前将CS、SS、EIP、ESP的值存储在MSR寄存器中,sysenter指令执行时,CPU会将MSR寄存器中的值直接写入相关的寄存器,没有读取内存的过程,所以叫快速调用。
2、在执行sysenter指令前,OS必须指定0环的CS段、SS段、EIP以及ESP。
| MSR寄存器 | MSR地址 | 含义 |
|---|---|---|
| IA32_SYSENTER_CS | 174h | 低16位值指定了特权级0的代码段和栈段的段选择符 |
| IA32_SYSENTER_ESP | 175h | 内核栈指针的32位偏移 |
| IA32_SYSENTER_EIP | 176h | 目前例程的32位偏移 |
如上表所示:0x174位置存放的是新的CS,0x175位置存放的是新的ESP,0x176位置存放的是新的EIP。SS并没有存在MSR寄存器里,执行sysenter后,CS+8就是SS。
可以通过RDMSR/WRMST来进行读写。
windbg查看这几个值:
rdmsr 174 //查看CS
rdmsr 175 //查看ESP
rdmsr 176 //查看EIP
0: kd> rdmsr 174
msr[174] = 00000000`00000008
0: kd> rdmsr 175
msr[175] = 00000000`bacd0000
0: kd> rdmsr 176
msr[176] = 00000000`80542520
EIP:KiFastCallEntry()
0: kd> u 80542520
nt!KiFastCallEntry:
80542520 b923000000 mov ecx,23h
80542525 6a30 push 30h
80542527 0fa1 pop fs
80542529 8ed9 mov ds,cx
8054252b 8ec1 mov es,cx
8054252d 648b0d40000000 mov ecx,dword ptr fs:[40h]
80542534 8b6104 mov esp,dword ptr [ecx+4]
80542537 6a23 push 23h
用户代码调用sysenter指令以前,必须将要返回的指令地址和栈指针保存到edx和ecx寄存器中,否则,内核模式代码将来无法设置正确的值,以使sysexit还能返回到用户模式代码原来的位置。
API通过sysenter指令进0环:
1、CS、ESP、EIP由MSR寄存器提供
2、进0环后执行的内核函数: NT!KiCallEntry
3、通过sysexit指令返回用户模式
sysexit:
将IA32_SYSENTER_CS+16装载到CS寄存器;将edx寄存器中的指针装载到eip寄存器中;(指定用户模式代码段)
将IA32_SYSENTER_CS+24装载到SS寄存器;将ecx寄存器中的指针装载到esp寄存器中;(指定用户模式栈段)
切换到特权级3,执行eip寄存器中指定的用户代码。
(三)API调用过程(保护现场)
为什么要保存现场?
要理解保存现场的必要性,首先得明白:
1、API调用过程中发生了什么?
内核API调用的过程,会涉及到进程的切换,如从3环切换到0环。
2、这些东西在调用前后有什么变化?
3、保存现场在这其中的作用?
如何保存现场?
先来熟悉一个结构:_KTrap_Frame 结构
0: kd> dt _KTrap_Frame
nt!_KTRAP_FRAME
//调试系统服务
+0x000 DbgEbp : Uint4B
+0x004 DbgEip : Uint4B
+0x008 DbgArgMark : Uint4B
+0x00c DbgArgPointer : Uint4B
//当需要调整栈时,以下作为临时变量
+0x010 TempSegCs : Uint4B
+0x014 TempEsp : Uint4B
//调试寄存器
+0x018 Dr0 : Uint4B
+0x01c Dr1 : Uint4B
+0x020 Dr2 : Uint4B
+0x024 Dr3 : Uint4B
+0x028 Dr6 : Uint4B
+0x02c Dr7 : Uint4B
//段寄存器
+0x030 SegGs : Uint4B
+0x034 SegEs : Uint4B
+0x038 SegDs : Uint4B
//易失寄存器
+0x03c Edx : Uint4B
+0x040 Ecx : Uint4B
+0x044 Eax : Uint4B
//非易失寄存器需要在中断历程中先保存
+0x048 PreviousPreviousMode : Uint4B
+0x04c ExceptionList : Ptr32 _EXCEPTION_REGISTRATION_RECORD
+0x050 SegFs : Uint4B
//非易失寄存器
+0x054 Edi : Uint4B
+0x058 Esi : Uint4B
+0x05c Ebx : Uint4B
+0x060 Ebp : Uint4B
//硬件填充,通过中断门进入的话,这个值就是NULL
+0x064 ErrCode : Uint4B
//中断发生时保存被中断的代码段和地址,iret返回到此地址
+0x068 Eip : Uint4B //硬件填充
+0x06c SegCs : Uint4B //硬件填充
+0x070 EFlags : Uint4B //硬件填充
+0x074 HardwareEsp : Uint4B
+0x078 HardwareSegSs : Uint4B
+0x07c V86Es : Uint4B
+0x080 V86Ds : Uint4B
+0x084 V86Fs : Uint4B
+0x088 V86Gs : Uint4B
无论是通过中断门进入0环,还是通过快速调用,3环所有的寄存器都会保存在这个结构里。
通过快速调用是不需要68~78号寄存器的。
IDA打开ntkrnlpa.exe, 查看KiSystemService函数细节如下:
(如果找不到这个函数,那可能就是符号库没加载成功,可以将调试机上的pdb文件拷到对应的被调试机的ntkrnlpa.exe目录)

.text:0046A451 _KiSystemService proc near ; CODE XREF: ZwAcceptConnectPort(x,x,x,x,x,x)+Cp
.text:0046A451 ; ZwAccessCheck(x,x,x,x,x,x,x,x)+Cp ...
.text:0046A451
.text:0046A451 arg_0 = dword ptr 4
.text:0046A451
.text:0046A451 push 0 ;保存ErrCode到esp0
.text:0046A453 push ebp ;保存ebp到esp0
.text:0046A454 push ebx ;保存ebx到esp0
.text:0046A455 push esi ;保存esi到esp0
.text:0046A456 push edi ;保存edi到esp0
.text:0046A457 push fs ;保存fs到esp
.text:0046A459 mov ebx, 30h ;FS寄存器,指向KPCR
.text:0046A45E mov fs, bx
权限发生切换时,堆栈也会发生改变。
内核层的ESP=TSS+4
Windows操作系统在每个处理器初始化时,会在GDT中为它构造一个TSS段,然后利用ltr指令设置处理器的任务环境段。
另外,Windows每次切换线程时,总会设置好TSS中0环的ESP,使其指向当前线程的内核栈。
保存3环寄存器值到_KTrap_Frame的0x50~0x64 的位置
将fs:0030做拆分,0030转化成二进制 0000 0000 0011 0000,RPL=0,index=6,即查GDT表的第6组:【ffc093df`f0000001 】
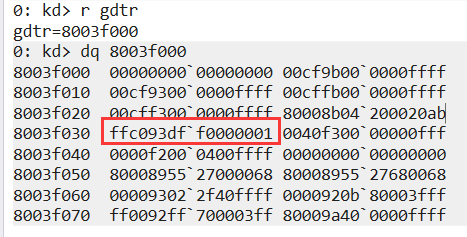
ffdff000这个地址刚好指向的就是CPU的KPCR结构,fs在3环指向的事PEB结构,在0环指向的就是KPCR。
.text:0046A461 assume fs:nothing
.text:0046A461 push large dword ptr fs:0 ;保存老的ExceptionList,KPCR+0x00-> _NT_TIB -> ExceptionList
.text:0046A468 mov large dword ptr fs:0, 0FFFFFFFFh ;新的ExceptionList是空白的
.text:0046A473 mov esi, large fs:124h ;得到当前正在执行的线程信息:KPCR
.text:0046A47A push dword ptr [esi+140h] ;保存老的“先前模式”到堆栈
;KTHREAD
;+0x140 PreviousMode
.text:0046A480 sub esp, 48h ;ESP _KTRAP_FRAME 结构指针
.text:0046A483 mov ebx, [esp+68h+arg_0] ;取出3环压入的参数CS _KTRAP_FRAME + 0x6C
.text:0046A487 and ebx, 1 ;0环最低为0, 3环最低为1
.text:0046A48A mov [esi+140h], bl ;新的先前模式
.text:0046A490 mov ebp, esp ;ESP==EDP _KTRAP_FRAME结构指针
.text:0046A492 mov ebx, [esi+134h] ;_KTHREAD中TrapFrame
.text:0046A498 mov [ebp+3Ch], ebx ;将_KTHREAD中的TrapFrame暂存在这个位置,后面会将这个值取出来,重新恢复给_KTHREAD中TrapFrame
Exceptionlist是异常链表
把老的Exceptionlist保存到_KTRAP_FRAME的 +0x4c位置,然后把它清0.
将KPCR+0x124放在esi中,也就是说将CurrentThread放在esi中。
将[esi+140]保存先前模式(_KTHREAD.PreviousMode )到_KTRAP_FRAME 的+0x48的位置。
再将堆栈提升0x48.
取出3环的CS放到ebx,然后将 esi+0x140=ebx &1,此时esi+0x140存储的就是新的先前模式。
那么这里反复提到的先前模式到底有什么用呢?
当我们调用这段代码的时候,如果是0环程序的先前模式就存0,3环就存1。OS通过先前模式就可以知道到底是哪一环的程序在调用自己。
提升栈底ebp与esp指向同一个位置 _KTRAP_FRAME 最开始的位置。
取出esi+0x134的位置是_KTHREAD.TrapFrame ,放在ebp+3c ???
.text:0046A49B mov [esi+134h], ebp ;将堆栈中形成的_KTRAP_FRAME的结构指针赋值给_KTHREAD中的TrapFrame
.text:0046A4A1 cld
.text:0046A4A2 mov ebx, [ebp+60h] ;3环的EBP
.text:0046A4A5 mov edi, [ebp+68h] ;3环的EIP
.text:0046A4A8 mov [ebp+0Ch], edx ;edx存储的是3环参数的指针
_KTRAP_FRAME 放到 _KTHREAD.TrapFrame
把3环的ebp放到ebx
把3环的eip放到edi
把3环的参数指针放到 _KTRAP_FRAME.DbgArgPointer
.text:0046A4AB mov dword ptr [ebp+8], 0BADB0D00h
.text:0046A4B2 mov [ebp+0], ebx ;3环的ebp存储到_KTRAP_FRAME +0x00 DbgEbp 的位置
.text:0046A4B5 mov [ebp+4], edi ;3环的eip存储到_KTRAP_FRAME+0x004 DbgEip的位置
.text:0046A4B8 test byte ptr [esi+2Ch], 0FFh ;判断_KTHREAD的+0x2c DebugActive 是否为-1
.text:0046A4BC jnz Dr_kss_a ;如果处于调试状态,跳转
.text:0046A4C2
.text:0046A4C2 loc_46A4C2: ; CODE XREF: Dr_kss_a+10j
.text:0046A4C2 ; Dr_kss_a+7Cj
.text:0046A4C2 sti ;关闭中断
.text:0046A4C3 jmp loc_46A5AF ;取出从3环传进来的系统调用号
.text:0046A4C3 _KiSystemService endp
0BADB0D00h 这是操作系统用到的一个标志,将它放到 _KTRAP_FRAME.DbgArgMark 。
ebp+0x00 = _KTRAP_FRAME.DbgEbp
ebp+0x04 = _KTRAP_FRAME.DbgEip
比较 _KTHREAD.DebugActive ,判断当前线程是否处于调试状态,如果是这个值就不是0ff。处于调试状态中的代码就会跳转到下面的代码。
.text:0046A34C Dr_kss_a proc near ; CODE XREF: _KiSystemService+6Bj
.text:0046A34C test dword ptr [ebp+70h], 20000h ;是否是虚拟8086模式(Eflags标志寄存器的VM位)
.text:0046A353 jnz short loc_46A362 ;不是跳转
.text:0046A355 test dword ptr [ebp+6Ch], 1
.text:0046A35C jz loc_46A4C2 ;关闭中断
.text:0046A362
.text:0046A362 loc_46A362: ; CODE XREF: Dr_kss_a+7j
.text:0046A362 mov ebx, dr0
.text:0046A365 mov ecx, dr1
.text:0046A368 mov edi, dr2
.text:0046A36B mov [ebp+18h], ebx ;存储Dr0寄存器到 _KTRAP_FRAME+0x18
.text:0046A36E mov [ebp+1Ch], ecx ;存储Dr1寄存器到 _KTRAP_FRAME+0x1C
.text:0046A371 mov [ebp+20h], edi ;存储Dr0寄存器到 _KTRAP_FRAME+0x20
.text:0046A374 mov ebx, dr3
.text:0046A377 mov ecx, dr6
.text:0046A37A mov edi, dr7
.text:0046A37D mov [ebp+24h], ebx ;存储Dr3寄存器到_KTRAP_FRAME
.text:0046A380 mov [ebp+28h], ecx ;存储Dr6寄存器到_KTRAP_FRAME
.text:0046A383 xor ebx, ebx
.text:0046A385 mov [ebp+2Ch], edi ;存储Dr7寄存器到_KTRAP_FRAME
.text:0046A388 mov dr7, ebx ;将Dr7寄存器清零
.text:0046A38B mov edi, large fs:20h ;得到_KPRCD指针
.text:0046A392 mov ebx, [edi+2F8h]
.text:0046A398 mov ecx, [edi+2FCh]
.text:0046A39E mov dr0, ebx
.text:0046A3A1 mov dr1, ecx
就是dr0~dr7存到_KTRAP_FRAME +0x18~+0x2c 。
如果当前线程的状态不处于调试的状态,就会转到下面这段代码:
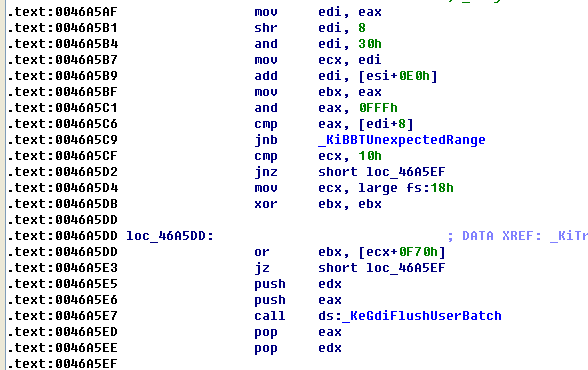
.text:0046A5AF loc_46A5AF: ; CODE XREF: _KiBBTUnexpectedRange+18j
.text:0046A5AF ; _KiSystemService+72j
.text:0046A5AF mov edi, eax
.text:0046A5B1 shr edi, 8
.text:0046A5B4 and edi, 30h
.text:0046A5B7 mov ecx, edi
.text:0046A5B9 add edi, [esi+0E0h]
.text:0046A5BF mov ebx, eax
.text:0046A5C1 and eax, 0FFFh
.text:0046A5C6 cmp eax, [edi+8]
.text:0046A5C9 jnb _KiBBTUnexpectedRange
.text:0046A5CF cmp ecx, 10h
.text:0046A5D2 jnz short loc_46A5EF
.text:0046A5D4 mov ecx, large fs:18h
.text:0046A5DB xor ebx, ebx
.text:0046A5DD
.text:0046A5DD loc_46A5DD: ; DATA XREF: _KiTrap0E+117o
.text:0046A5DD or ebx, [ecx+0F70h]
.text:0046A5E3 jz short loc_46A5EF
.text:0046A5E5 push edx
.text:0046A5E6 push eax
.text:0046A5E7 call ds:_KeGdiFlushUserBatch
.text:0046A5ED pop eax
.text:0046A5EE pop edx
.text:0046A5EF
.text:0046A5EF loc_46A5EF: ; CODE XREF: _KiFastCallEntry+B2j
.text:0046A5EF ; _KiFastCallEntry+C3j
我们跟踪代码发现,无论是KiFastCallEntry 还是 KisystenService ,最终都会调用一下这个代码。
kiSystenService:
进入0环后原来3环的寄存器保存在_KTrap_Frame的0x50~0x64
把3环的参数指针放到_KTRAP_FRAME.DbgArgPointer
以上过程是kiSystenService从0环进入3环的填表过程。
KiFastCallEntry的填表过程
.text:0046A520 mov ecx, 23h
.text:0046A525 push 30h
.text:0046A527 pop fs ;修改fs寄存器为30
.text:0046A529 mov ds, ecx
.text:0046A52B mov es, ecx
.text:0046A52D mov ecx, large fs:40h ;获取当前TSS
.text:0046A534 mov esp, [ecx+4] ;TSS中得到ESP
.text:0046A537 push 23h ;原SS压栈
.text:0046A539 push edx ;原ESP压栈
.text:0046A53A pushf ;EFLAGS压栈
TSS = KPCR+40,ESP0=TSS+4(0表示0环)
push到 _KTrap_Frame
+0x078 HardwareSegSs : Uint4B
+0x074 HardwareEsp : Uint4B
+0x070 EFlags : Uint4B
完整的IDA分析代码如下:
.text:0046A520
.text:0046A520 mov ecx, 23h
.text:0046A525 push 30h
.text:0046A527 pop fs ;修改fs寄存器为30
.text:0046A529 mov ds, ecx
.text:0046A52B mov es, ecx
.text:0046A52D mov ecx, large fs:40h ;获取当前TSS
.text:0046A534 mov esp, [ecx+4] ;TSS中得到ESP
.text:0046A537 push 23h ;原ss压栈
.text:0046A539 push edx ;原esp压栈
.text:0046A53A pushf ;EFLAGS压栈
.text:0046A53B
.text:0046A53B loc_46A53B: ; CODE XREF: _KiFastCallEntry2+23j
.text:0046A53B push 2
.text:0046A53D add edx, 8 ;当前保存着systener进入前的esp的值,esp+8=参数指针
.text:0046A540 popf
.text:0046A541 or byte ptr [esp+1], 2 ;KtrapFrame->Eflags.if = 1
.text:0046A546 push 1Bh ; KtrapFrame->CS=0x1b 保存r3的cs
.text:0046A548 push dword ptr ds:0FFDF0304h ; KtrapFrame->EIP =返回地址
.text:0046A54E push 0 ; KtrapFrame->Error = 0
.text:0046A550 push ebp ; KtrapFrame->ebp = ebp
.text:0046A551 push ebx ; KtrapFrame->ebx = ebx
.text:0046A552 push esi ; KtrapFrame->esi = esi
.text:0046A553 push edi ; KtrapFrame->edi = edi
.text:0046A554 mov ebx, large fs:1Ch
.text:0046A55B push 3Bh ; KtrapFrame->SegFs = 0x3b 保存r3的fs
.text:0046A55D mov esi, [ebx+124h] ; 得到当前线程结构
.text:0046A563 push dword ptr [ebx] ; KtrapFrame->0x4c 保存原异常链
.text:0046A565 mov dword ptr [ebx], 0FFFFFFFFh ; 设置为空的异常链
.text:0046A56B mov ebp, [esi+18h] ; 得到初始堆栈KtrapFrame->0x48
.text:0046A56E push 1 ; KtrapFrame->PreviousPreviousMode = 1
.text:0046A570 sub esp, 48h ; 提升栈顶指针到_Ktrap_Frame
.text:0046A573 sub ebp, 29Ch ; Ktrap_Frame
.text:0046A579 mov byte ptr [esi+140h], 1 ; 先前模式
.text:0046A580 cmp ebp, esp
.text:0046A582 jnz short loc_46A511
.text:0046A584 and dword ptr [ebp+2Ch], 0 ; 清零dr7
.text:0046A588 test byte ptr [esi+2Ch], 0FFh ; 检查是否处于调试状态
.text:0046A58C mov [esi+134h], ebp
.text:0046A592 jnz Dr_FastCallDrSave
.text:0046A598
.text:0046A598 loc_46A598: ; CODE XREF: Dr_FastCallDrSave+10j
.text:0046A598 ; Dr_FastCallDrSave+7Cj
.text:0046A598 mov ebx, [ebp+60h] ; ebp = KtrapFrame->ebp
.text:0046A59B mov edi, [ebp+68h] ; edi = KtrapFrame->eip
.text:0046A59E mov [ebp+0Ch], edx ; KtrapFrame->DbgArgPointer = 参数指针
.text:0046A5A1 mov dword ptr [ebp+8], 0BADB0D00h
.text:0046A5A8 mov [ebp+0], ebx ; KtrapFrame->DbgEbp = ebx
.text:0046A5AB mov [ebp+4], edi ; KtrapFrame->DbgEip = edi
.text:0046A5AE sti
(四)API调用(系统服务表)
1、前言
API从Ring3到Ring0需要带两个寄存器:eax,edx。其中eax保存的是系统的服务号,edx保存的事Ring3的esp,我们可以通过esp找到三环的参数。
那我们该如何找到Ring0的参数呢?
本篇主要解决的是,如何通过eax找到Ring0的函数,Ring0的函数是如何被调用的,并且在这个过程中,Ring0的函数是如何使用Ring3的参数的?
2、系统服务表
在OS内核里,有一张系统服务表(SystemServiceTable),如下图:

在这里有4个成员分别为:
-
ServiceTable 这个成员是个地址,通过这个地址可以找到一个函数地址表,从三环进0环的eax服务号就是函数地址表的索引。
-
count当前的系统服务表被调用了多少次。
-
ServiceLimit 保存的是函数地址表的大小,即服务函数的个数。
-
ArgmentTable 函数参数表,里面保存的是函数地址表对应的参数个数。
-
总共有两份系统服务表,其中一份函数来自于Ntoskrl.exe 内核模块的导出函数,里面保存常用的系统服务;另一份来自Win32k.sys的导出函数,里面是与图形和用户界面相关的系统服务。它们向三环提供的内核函数全在这两张表里。
3、如何找到系统服务表
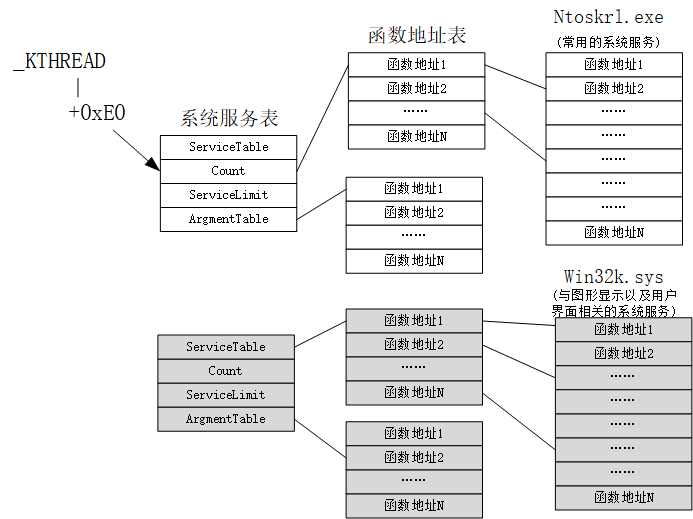
系统服务表位于_KTHREAD结构体0xE0的位置。
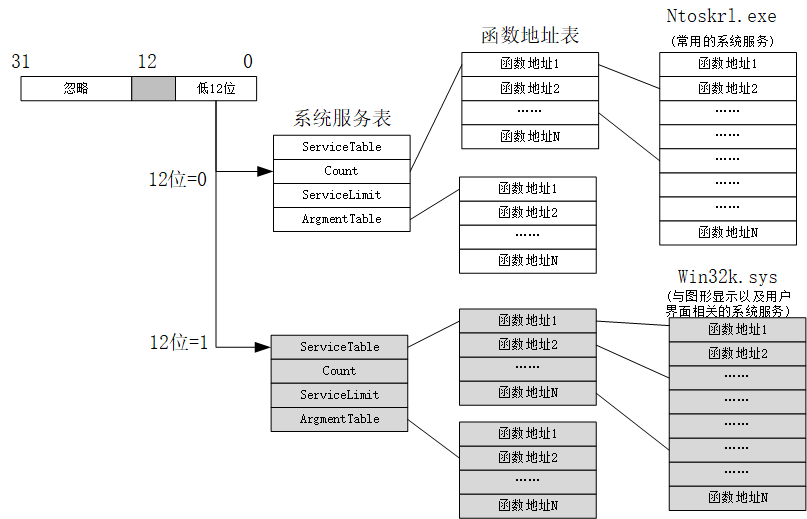
4、判断调用的函数在哪个表
-
要找到两张表取决于eax系统服务号,这个系统服务号总共有32位,但是真正只使用了13位。
-
系统服务号在使用的时候分为两部分,低12位表示的是函数地址表的索引,下标为12的位置的值,决定使用哪张表。
-
如果第12位为0,则找第一张表(图中的白色区域);如果第12位为1,则找第二张表(图中的灰色区域)。
5、分析API函数的调用过程
通过以上的系统服务表分析,思考一下0环代码是如何通过服务号找到0环的函数的?0环的函数是如何使用在三环的参数的?
用IDA打开 ntkrnlpa.exe ,找到 KiFastCallEntry 、KiSystemService 函数,KiFastCallEntry 和 KiSystemService前面的代码都是用于保存现场,代码如下:
保存现场后,取出3环传进来的系统调用号:
.text:0046A5AF mov edi, eax ;取出3环传进来的系统调用号
首先将3环传递过来的系统调用号保存到edi里:
.text:0046A5B1 shr edi, 8 ;系统调用号右移8位
.text:0046A5B4 and edi, 30h ;判断调用号的第12位是0还是1
.text:0046A5B7 mov ecx, edi ;ecx存储的值是00 或 0x10
然后将系统调用号右移8位,然后再和0x30做与运算。此时,edi的结果只能有两种,要么是0x0,要么是0x10。如果是0的话,就说明调用号下标为12的位置是0,如果edi的结果是0x10,那么调用号下标为12的位置是1。
.text:0046A5B9 add edi, [esi+0E0h] ;edi指向KTHREAD-->ServiceTable
esi指向的是ETHREAD线程结构体,ETHREAD+0xE位置存的就是ServiceTable。
当edi=0时,ServiceTable+edi 指向的就是第一张ServiceTable;
当edi=0x10时,ServiceTable+edi 指向的就是第二张ServiceTable。
.text:0046A5BF mov ebx, eax ;把三环的系统服务号存到ebx备份
.text:0046A5C1 and eax, 0FFFh ;系统调用号,只保留后12位
接着把系统调用号备份到ebx,然后 &0FFFh,保留后12位。
.text:0046A5C6 cmp eax, [edi+8]
.text:0046A5C9 jnb _KiBBTUnexpectedRange
[edi+8]存的是ServiceLimit(服务函数个数),如果传入的调用号的低12位>ServiceLimit,就jmp到_KiBBTUnexpectedRange。 这里是判断是否越界,即要找的函数地址有没有超过函数地址表的范围,如果没有越界就继续往下走。
.text:0046A5CF cmp ecx, 10h ;判断是否是查第二张系统服务表
.text:0046A5D2 jnz short loc_46A5EF ;如果是查第一张系统服务表,则jmp
这里将ecx和0x10进行比较,ecx存储的是 0x00或0x10,如果ecx是0x10,就说明要查第二张系统服务表。
如果要查第一张服务表,就会jmp;如果查第一张表则继续往下执行。
.text:0046A5D4 mov ecx, large fs:18h
.text:0046A5DB xor ebx, ebx
.text:0046A5DD
.text:0046A5DD loc_46A5DD: ; DATA XREF: _KiTrap0E+117o
.text:0046A5DD or ebx, [ecx+0F70h]
.text:0046A5E3 jz short loc_46A5EF
.text:0046A5E5 push edx
.text:0046A5E6 push eax
.text:0046A5E7 call ds:_KeGdiFlushUserBatch
.text:0046A5ED pop eax
.text:0046A5EE pop edx
调用_KeGdiFlushUserBatch函数后,假设我们查找的是第一张系统服务表
.text:0046A5EF ; _KiFastCallEntry+C3j
.text:0046A5EF inc large dword ptr fs:638h ; _KPCRB->0x518 KeSystemCall增加1
.text:0046A5F6 mov esi, edx ; edx存储的三环的参数指针
这里将edx保存到esi,edx存储的是三环的参数指针。
.text:0046A5F8 mov ebx, [edi+0Ch] ;ebx-->参数起始位置
edi->系统服务表的起始位置,[edi+0Ch]存的是ParamTableBase 参数表的基址 ,ebx-->参数起始位置。
.text:0046A5FD mov cl, [eax+ebx] ;eax->函数地址表索引,ebx->参数表的起始位置 ,cl->参数的个数
参数表的基址+函数地址表的索引,再取得到的值就是要调用的函数的参数个数。
.text:0046A600 mov edi, [edi] ;edi->系统服务表,第一个成员是函数地址表
取出函数地址表,放到edi。
.text:0046A602 mov ebx, [edi+eax*4] ;ebx->零环的函数地址
edi为函数地址表+eax索引*4,实现将0环的函数地址存到ebx。
.text:0046A605 sub esp, ecx ;提升堆栈高度到cl
为了能够存储3环的参数,提升堆栈到cl(参数个数)。
.text:0046A607 shr ecx, 2 ;参数总长度/4 = 参数的个数
.text:0046A60A mov edi, esp
.text:0046A60C cmp esi, ds:_MmUserProbeAddress
.text:0046A612 jnb loc_46A7C0
.text:0046A618
.text:0046A618 loc_46A618: ; CODE XREF: _KiFastCallEntry+2A4j
.text:0046A618 ; DATA XREF: _KiTrap0E+10Do
.text:0046A618 rep movsd ;开始拷贝参数
.text:0046A61A call ebx
将ecx右移2位,即将ecx/4=参数的个数。我们知道rep的次数,取决于ecx,而movsd每次复制4个字节,所以需要将ecx/4。
.text:0046A60C cmp esi, ds:_MmUserProbeAddress ;判断3环参数的地址范围是否越界
.text:0046A612 jnb loc_46A7C0 ;越界跳转到错误处理模块
_MmUserProbeAddress是一个全局变量,是用户程序能访问地址的最大范围。esi指向的是3环的函数指针,将esi与_MmUserProbeAddress比较,是为了判断3环参数的地址范围是否越界,如果越界则跳转到错误处理模块。
.text:0046A61A call ebx ;调用函数
最后将3环的参数赋值到0环,开始真正的内核函数。
(五)API函数的调用过程(SSDT)
在前一章,我们逆向分析得出:KTHREAD +0xE0 -->系统服务表。实际上,Windows提供了一个到处的全局变量,通过这个变量,就可以直接访问系统服务表。
1、分析KeServiceDescriptorTable
- IDA打开ntkrnlpa.exe ,在export中搜索KeServiceDescriptorTable
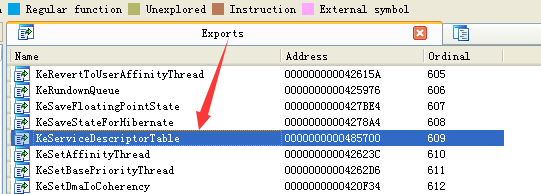
- 在Windbg中查看这个变量
2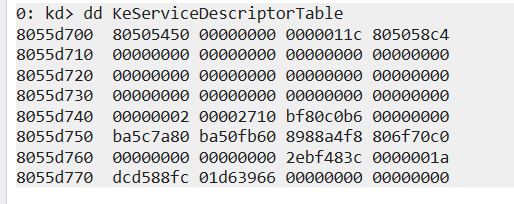
这就是所谓的SSDT了。
2、系统服务描述表,SSDT
SSDT(System Service Despcriptor Table,系统服务描述表),SSDT结构包含4个成员,这4个成员都是一个系统服务表的结构体。
接下来,在windbg里看一下每个成员:
3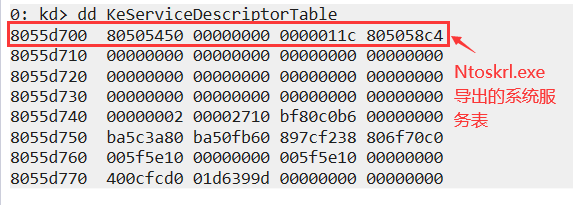
用SSDT查看只有一张表,这个表就是Ntoskrl.exe![]
导出的,后面的3个成员都是空的。
3、SSDT Shadow
通过SSSDT就能同时看到Ntoskrl.exe与win32k.sys导出的表 。
4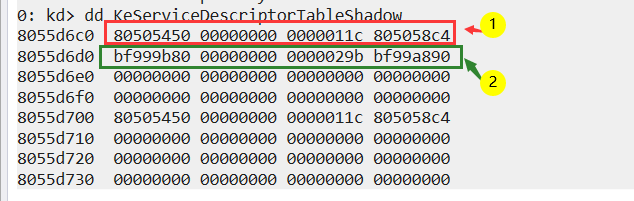
typedef struct _KSYSTEM_SERVICE_TABLE
{
PULONG ServiceTableBase; //这个指向系统服务函数地址表
PULONG ServiceCounterTableBase; //系统这个服务表调用了几次
ULONG NumberOfService; //服务函数的个数
PULONG ParamTableBase; //参数表
}KSYSTEM_SERVICE_TABLE, *PKSYSTEM_SERVICE_TABLE;
PSYSTEM_SERVICE_TABLE Ntoskr_ssdt;
//这4个参数就是对应第一个系统服务表导出的值
Ntoskr_ssdt->ServiceTableBase = 80505450;
Ntoskr_ssdt->ServiceCounterTableBase = 00000000;
Ntoskr_ssdt->NumberOfService = 0000011c;
Ntoskr_ssdt->ParamTableBase = 805058c4;
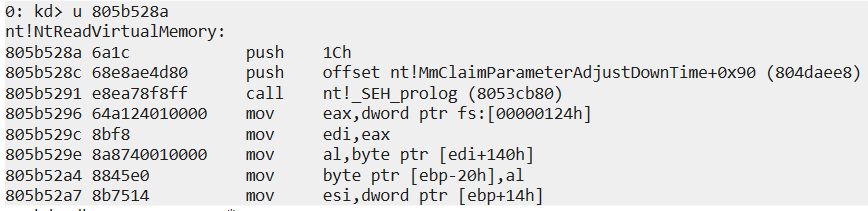
系统服务表基址+0xBA--->ReadVirtualMemory:

查看ReadVirtualMemory函数反汇编:
查看参数表
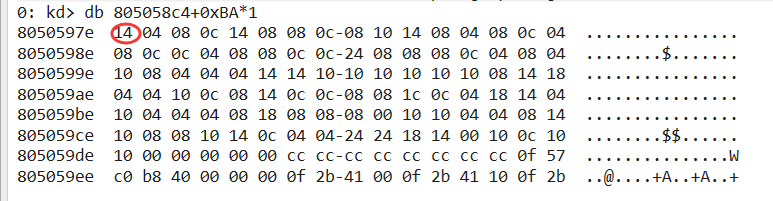
0x14的十进制是20,它当前所有的参数加起来有20个字节,每个参数4字节,所以它有5个参数。