图论中的经典问题:给一个图,求出起点到终点的最短路径。
Graph Representation
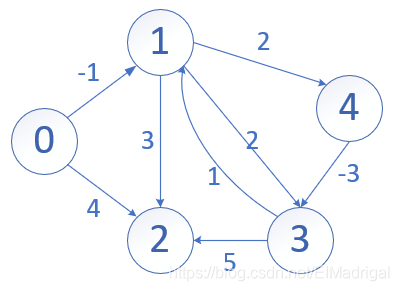
- adjacency matrix
| i/j | 0 | 1 | 2 | 3 | 4 |
|---|---|---|---|---|---|
| 0 | (infty) | -1 | 4 | (infty) | (infty) |
| 1 | (infty) | (infty) | 3 | 2 | 2 |
| 2 | (infty) | (infty) | (infty) | (infty) | (infty) |
| 3 | (infty) | 1 | 5 | (infty) | (infty) |
| 4 | (infty) | (infty) | (infty) | -3 | (infty) |
用vector<vector<int>> g(n, vector<int>(n, INF))表示,g[i][j]表示从顶点(i)到顶点(j)的权重,空间复杂度(O(|V|^2)),适用于稠密图,用的不多;
- adjacency list
链表比较少用,基本都用动态数组:
| 0 | (1,-1) | (2,4) | - | - | - |
|---|---|---|---|---|---|
| 1 | (2,3) | (3,2) | (4,2) | - | - |
| 2 | - | - | - | - | - |
| 3 | (1,1) | (2,5) | - | - | - |
| 4 | (3,-3) | - | - | - | - |
用vector<vector<pair<int, int>>> g表示,g[i][j].first表示从顶点(i)出发到达的顶点(k),g[i][j].second表示从顶点(i)到顶点(k)的权值,空间复杂度(O(|V|+|E|))。
- edge list
(0,1,-1),(0,2,4),(1,2,3),(1,3,2),(1,4,2),(3,1,1),(3,2,5),(4,3,-3)
用vector<vector<int>> e表示,e[i][0]表示顶点(u),e[i][1]表示顶点(v),e[i][2]表示(u)到(v)的权值,空间复杂度(O(|E|))。
Dijkstra
单源最短路径算法,只能用于所有边权值为正的图,本质上还是贪心,思想:
- 将所有结点分为两类:已经确定最短路径的点集(u)、未确定最短路径的点(v);
- 初始化(dis[start]=0),其余结点(dis)设为无穷大;
- 找出一个(dis)最小的(v)中的点(x),将其标记为(u),遍历(x)的所有出边,若(dis[y]>dis[x]+weight),则更新(y)点到源点的最短路径长度(dis[y]=dis[x]+weight);
- 重复,直到所有点都在(u)中。
/*邻接矩阵版,适合顶点比较少的图,复杂度O(V^2)*/
int vertexNum, adjMatrix[MAXN][MAXN];
int dis[MAXN]; //起点到各点最短路径长度
bool visited[MAXN] = {false};
void Dijkstra(int start)
{
for (int i = 0; i < vertexNum; i++)
{
dis[i] = INFINITY;
}
dis[start] = 0;
for (int i = 0; i < vertexNum; i++)
{
//寻找未访问点中dis最小的
int u = -1, minDis = INFINITY;
for (int j = 0; j < vertexNum; j++)
{
if (visited[j] == false && dis[j] < minDis)
{
u = j;
minDis = dis[j];
}
}
if (u == -1) //剩余的点与起点不连通
return;
visited[u] = true;
//以u为中介试图优化dis[j]
for (int j = 0; j < vertexNum; j++)
{
//未访问、u可达、路过u可以使dis[j]更优
if (visited[j] == false && adjMatrix[u][j] != INFINITY && dis[u] + adjMatrix[u][j] < dis[j])
dis[j] = dis[u] + adjMatrix[u][j];
}
}
}
/*邻接表版,复杂度O(V^2+E)*/
int vertexNum;
int dis[MAXN]; //dis[i]表示源点到i点的最小距离
bool visited[MAXN] = {false};
struct Edge{
int des; //边的目标顶点
int weight; //边的权值
};
vector<Edge> adjList[MAXN]; //邻接表
void dijkstra(int start)
{
for(int i = 0;i < vertexNum;i++)
{
dis[i] = INT_MAX;
}
dis[start] = 0;
for(int i = 0;i < vertexNum;i++)
{
int u = -1,minDis = INT_MAX;
for(int j = 0;j < vertexNum;j++)
{
if(visited[j] == false && dis[j] < minDis)
{
u = j;
minDis = dis[j];
}
}
if(u == -1)
return;
visited[u] = true;
for(int j = 0;j < adjList[u].size();j++)
{
//直接获得u能到达的点
int v = adjList[u][j].des;
if(visited[v] == false && dis[v] > dis[u] + adjList[u][j].weight)
{
dis[v] = dis[u] + adjList[u][j].weight;
}
}
}
}
寻找(dis[u])的循环可以用堆来优化,使得复杂度降为(O(VlogV+E))。
Bellman-Ford
可以计算含有负权的边,检测是否存在一个从源结点可以到达的权重为负值的环路(负权环):
bool bellmanFord(vector<vector<int>>& edge, vector<int>& dis, int start) {
for (int i = 0; i < dis.size(); ++i) {
if (i == start)
dis[i] = 0;
else
dis[i] = 0x3f3f3f3f;
}
for (int i = 0; i < dis.size(); ++i)
for (int j = 0; j < edge.size(); ++j)
dis[edge[j][1]] = min(dis[edge[j][1]], dis[edge[j][0]] + edge[j][2]);
bool negCycle = false;
for (int i = 0; i < edge.size(); ++i)
if (dis[edge[i][1]] > dis[edge[i][0]] + edge[i][2]) {
negCycle = true;
break;
}
return negCycle;
}
复杂度(O(VE))。
Floyd-Warshall
多源最短路径算法。
void floyd(vector<vector<int>>& m) {
for(size_t k = 0;k < m.size();++k)
for(size_t i = 0;i < m.size();++i)
for (size_t j = 0; j < m.size(); ++j) {
// m不能用INT_MAX初始化,会溢出,用0x3f3f3f3f
if (m[i][k] + m[k][j] < m[i][j])
m[i][j] = m[i][k] + m[k][j];
}
}
不能用于含有负权环的图,这种图不存在最短路径。