1.定时器介绍
STM32F1的定时器非常多,由2个基本定时器(TIM6、TIM7)、4个通 用定时器(TIM2-TIM5)和2个高级定时器(TIM1、TIM8)组成。基本定 时器的功能最为简单,类似于51单片机内定时器。通用定时器是在基本 定时器的基础上扩展而来,增加了输入捕获与输出比较等功能。高级定 时器又是在通用定时器基础上扩展而来,增加了可编程死区互补输出、 重复计数器、带刹车(断路)功能,这些功能主要针对工业电机控制方面
1.1 通用定时器简介
STM32F1的通用定时器包含一个 16 位自动重载计数器(CNT),该计数器由可编程预分频器(PSC)驱动。STM32F1的通用定时器可用于多种 用途,包括测量输入信号的脉冲宽度(输入捕获)或者生成输出波形(输出 比较和PWM)等。 使用定时器预分频器和 RCC 时钟控制器预分频器,脉 冲长度和波形周期可以在几个微秒到几个毫秒间调整。STM32F1 的每个 通用定时器都是完全独立的,没有互相共享的任何资源。
STM32F1的通用定时器TIMx (TIM2-TIM5 )具有如下功能:
(1)16 位向上、向下、向上/向下自动装载计数器(TIMx_CNT)。
(2)16 位可编程(可以实时修改)预分频器(TIMx_PSC),计数器时钟频率的分频系数为 1~65535之间的任意数值。
(3)4个独立通道(TIMx_CH1-4),这些通道可以用来作为:
A.输入捕获
B.输出比较
C. PWM 生成(边缘或中间对齐模式)
D.单脉冲模式输出
(4)可使用外部信号(TIMx_ETR)控制定时器,且可实现多个定时器互连(可以用1个定时器控制另外一个定时器)的同步电路。
(5)发生如下事件时产生中断/DMA请求:
A.更新:计数器向上溢出/向下溢出,计数器初始化(通过软件或者内部/外部触发)
B.触发事件(计数器启动、停止、初始化或者由内部/外部触发计数)
C.输入捕获
D.输出比较
(6)支持针对定位的增量(正交)编码器和霍尔传感器电路
(7)触发输入作为外部时钟或者按周期的电流管理
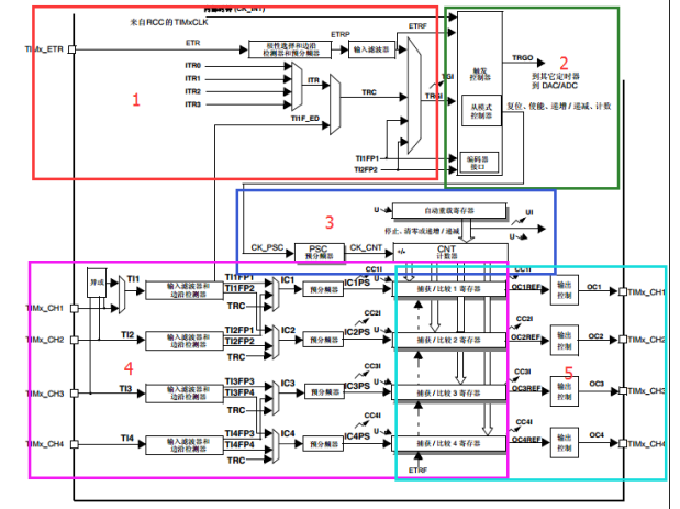
1.2 通用定时器结构框图
2.通用定时器配置步骤
(1)使能定时器时钟 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4,ENABLE);//使能TIM4时钟
(2)初始化定时器参数,包含自动重装值,分频系数,计数方式等
void TIM_TimeBaseInit(TIM_TypeDef* TIMx , TIM_TimeBaseInitTypeDef* TIM_TimeBaseInitStruct);
typedef struct
{
uint16_t TIM_Prescaler; //定时器预分频器
uint16_t TIM_CounterMode; //计数模式
uint32_t TIM_Period; //定时器周期
uint16_t TIM_ClockDivision; //时钟分频
uint8_t TIM_RepetitionCounter; //重复计数器
} TIM_TimeBaseInitTypeDef;
了解结构体成员功能后,就可以进行配置,例如: TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; TIM_TimeBaseInitStructure.TIM_Period=1000; //自动装载值 TIM_TimeBaseInitStructure.TIM_Prescaler=35999; //分频系数 TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1; TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up; //设置向上计数模式 TIM_TimeBaseInit(TIM4,&TIM_TimeBaseInitStructure); 定时器定时时间计算公式如下: Tout= ((per)*(psc+1))/Tclk; (3)设置定时器中断类型,并使能 void TIM_ITConfig(TIM_TypeDef* TIMx, uint16_t TIM_IT, FunctionalState NewState); (4)设置定时器中断优先级,使能定时器中断通道 NVIC初始化库函数是NVIC_Init(); (5)开启定时器 void TIM_Cmd(TIM_TypeDef* TIMx, FunctionalState NewState); (6)编写定时器中断服务函数 TIM4_IRQHandler ITStatus TIM_GetITStatus(TIM_TypeDef* TIMx, uint16_t TIM_IT); if(TIM_GetITStatus(TIM4,TIM_IT_Update)) { ...//执行TIM4更新中断内控制 } void TIM_ClearITPendingBit(TIM_TypeDef* TIMx, uint16_t TIM_IT);
固件库中还有两个函数是用来读取状态标志位以及清除中断标志位,函数分别为TIM_GetFlagStatus和TIM_ClearFlag。