相关笔记:
吴恩达机器学习笔记(三) —— Regularization正则化
(
问题遗留:

小可只知道引入正则项能降低参数的取值,但为什么能保证 Σθ2 <=λ ?
)
主要内容:
一.线性回归之普通最小二乘法
二.局部加权线性回归
三.岭回归(L2正则项)
四.lasso回归(L1正则项)
五.前向逐步回归
一.线性回归之普通最小二乘法
1.参数的值: (不带正则项)
(不带正则项)
2.Python代码:
def standRegres(xArr, yArr): #普通最小二乘法(没有特征归一化),其实就是不带正则项的最小二乘法 xMat = mat(xArr); yMat = mat(yArr).T xTx = xMat.T * xMat if linalg.det(xTx) == 0.0: #如果方阵XTX的行列式为0,则不存在逆矩阵,所以结果不可求。 print "This matrix is singular, cannot do inverse" return ws = xTx.I * (xMat.T * yMat) #求出权值w,即参数 return ws
二.局部加权线性回归
1.线性回归很容易出现欠拟合的现象,为了解决这个问题,我们可以使用局部加权线性回归。所谓“加权”,就是给每一个训练数据加上一个权值,而这个权值是根据训练数据点与测试数据点的远近而设定的。训练点离测试点越近,其权值越大;反之则反。
2.训练点 i 的权值 W(i, i) 为:

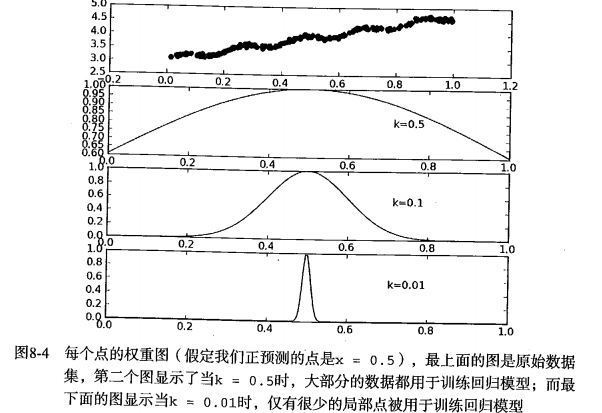
其中W为对角矩阵,对角线上的值就是数据点的权值。式子中k的值决定了测试点附近的点被赋予多大的权值,且k越小,附近点所占的权值越大,如图:
3.可求得参数的值为:

4.Python代码:
'''k决定了测试点附近的训练点被赋予多大的权值,k越小,权值越大''' def lwlr(testPoint, xArr, yArr, k=1.0): #局部加权线性回归(只能针对一个测试数据) xMat = mat(xArr); yMat = mat(yArr).T m = shape(xMat)[0] weights = mat(eye((m))) for j in range(m): # next 2 lines create weights matrix diffMat = testPoint - xMat[j, :] # weights[j, j] = exp(diffMat * diffMat.T / (-2.0 * k ** 2)) xTx = xMat.T * (weights * xMat) if linalg.det(xTx) == 0.0: print "This matrix is singular, cannot do inverse" return ws = xTx.I * (xMat.T * (weights * yMat)) return testPoint * ws def lwlrTest(testArr, xArr, yArr, k=1.0): # 批量求局部加权线性回归(针对多个测试数据) m = shape(testArr)[0] yHat = zeros(m) for i in range(m): yHat[i] = lwlr(testArr[i], xArr, yArr, k) return yHat
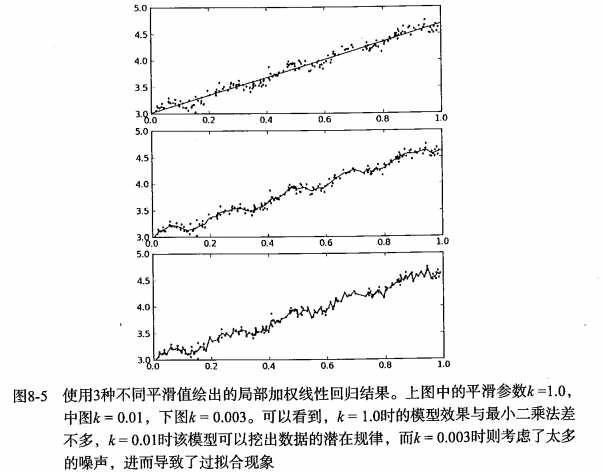
5.拟合效果如图所示,可知当k越小时,对训练数据的拟合效果越好,但是“过好”的话就出现了过拟合,如第三幅图。而效果最好的当属第二幅图:
6.由上述分析以及代码可知,局部加权线性回归有个明显的弱点,那就是:对于每一个测试数据,都需要重新对训练数据集求出权值W,这个计算量应该挺大的。
三.岭回归
1.上述两种线性回归模型都是通过最小二乘法来求解参数的,但是最小二乘法要求矩阵XTX存在逆矩阵,而这并不能保证。于是就有了“岭回归”。
2.所谓岭回归,其实就是在普通的损失函数上加上一个正则项,然而再对其用求导法,其损失函数和参数的值如下:


3.如上式子,听闻 (XTX + λI) 的逆矩阵是必定存在的(除非λ=0),那么为什么通过引入正则项就可以使得其逆矩阵存在呢?
答:从感性上去理解,可知如果数据的特征比数据样本点还多,那么逆矩阵是求不出来的。而加入正则项之后,使得一些不重要的特征的参数接近于0或者等于0,这样就近似于把一些特征给“废掉”了。特征减少之后,可能就达到了特征数少于等于样本数的情况,从而使得逆矩阵可以被求出。
4.Python代码:
def regularize(xMat): # 特征归一化 inMat = xMat.copy() inMeans = mean(inMat, 0) # calc mean then subtract it off inVar = var(inMat, 0) # calc variance of Xi then divide by it inMat = (inMat - inMeans) / inVar return inMat def ridgeRegres(xMat, yMat, lam=0.2): #岭回归,其实就是加入了正则项的最小二乘法。能对XTX求逆,但还是需要进行判断。 xTx = xMat.T * xMat denom = xTx + eye(shape(xMat)[1]) * lam if linalg.det(denom) == 0.0: print "This matrix is singular, cannot do inverse" return ws = denom.I * (xMat.T * yMat) return ws def ridgeTest(xArr, yArr): #岭回归测试, 在30个不同的lambda下获得的参数 xMat = mat(xArr); yMat = mat(yArr).T xMat = regularize(xMat) # 特征归一化 yMean = mean(yMat, 0) yMat = yMat - yMean # to eliminate X0 take mean off of Y……不懂这一步的作用 numTestPts = 30 wMat = zeros((numTestPts, shape(xMat)[1])) for i in range(numTestPts): #h获取每个lambda下模型的参数 ws = ridgeRegres(xMat, yMat, exp(i - 10)) wMat[i, :] = ws.T return wMat
四.lasso回归
1.岭回归的正则项使用的平方项(有说法是L2范数,但L2范数不是在求完平方和之后还要开根吗?所以个人认为:岭回归的正则项是L2范数的平方),根据y=x^2的图像可知:
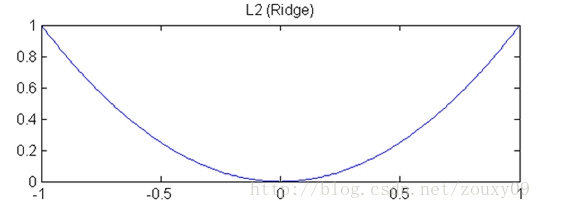
1)当|x|>1, 曲线的斜率很大,这就能加快梯度下降收敛的速度。
2)当|x|<=1时,斜率就变得非常小,此时正则项的作用可以说是失效的了,即不再具备惩罚参数的作用。
总和上述两点可知岭回归的特点是:能加速梯度下降的速度,且使得参数的值较小,但是不能直接把参数变成0(即使很接近0),这样岭回归的特征选取的功能就相对弱一些。
2.为了增强特征选取的功能,我们可以把岭回归的正则项换成是一次项绝对值,即L1范数:

可知y=|x|的图像如下:
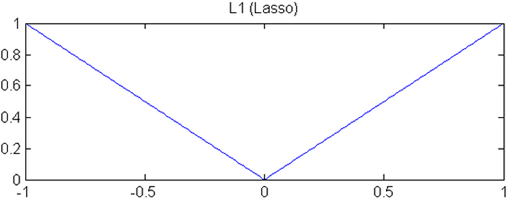
1)曲线的斜率不会发生变化,也就是说正则项的乘法功效是恒定的,这也就使得梯度下降慢而稳定。
2)当|x|<=1时,相比y=x^2,y=|x|的斜率更大,这就使得把某些参数变成0成为了可能。所以lasso回归的特征选择的作用更加强大。
3.有一个数形结合的方法可以很好地解释为什么lasso回归比岭回归有更好的特征选取的作用。如下图:

其中左边的是lasso回归,右边的是岭回归。那一圈圈椭圆为目标函数(不知应该怎么叫,风险项?),而菱形和圆都为限制函数。其中交点就是我们最终求得的参数。
可知,椭圆与菱形的交点很容易出现在菱形的尖尖(顶点),而顶点位于坐标轴上,就是某个或者某些(多维的情况下)参数为0的情况,参数为0的那个特征就背废掉了。而圆与椭圆的交点要出现在坐标轴上的概率就没那么大了。所以lasso回归比岭回归有更好的特征选取的作用。
五.前向逐步回归
Python代码:
def regularize(xMat): # 特征归一化 inMat = xMat.copy() inMeans = mean(inMat, 0) # calc mean then subtract it off inVar = var(inMat, 0) # calc variance of Xi then divide by it inMat = (inMat - inMeans) / inVar return inMat def rssError(yArr, yHatArr): # 求出RSS残差平方和 return ((yArr - yHatArr) ** 2).sum() def stageWise(xArr, yArr, eps=0.01, numIt=100): #前向逐步回归 xMat = mat(xArr); yMat = mat(yArr).T xMat = regularize(xMat) #归一化特征 yMean = mean(yMat, 0) yMat = yMat - yMean # can also regularize ys but will get smaller coef m, n = shape(xMat) ws = zeros((n, 1)) for i in range(numIt): #走numIt步,每一步从:所有的参数加一小部分或减一小部分 中选出RSS最小的那一个来更新参数 lowestError = inf wsMax = ws.copy() #用于保存当前步中RSS最小的那一组参数 for j in range(n): #枚举每一个参数 for sign in [-1, 1]: #-1为减 1为加 wsTest = ws.copy() #临时变量 wsTest[j] += eps * sign yTest = xMat * wsTest rssE = rssError(yMat.A, yTest.A) if rssE < lowestError: #更新当前步的最优参数组 lowestError = rssE wsMax = wsTest ws = wsMax.copy() #更新最优参数组 return ws