1.树
描述:自由树是一个连通的,无回路的无向图。
树不是一种线性结构,但它具有一定的线性特征。
树也可以这样定义:树是由根结点和若干颗子树构成的。树是由一个集合以及在该集合上定义的一种关系构成的。集合中的元素称为树的结点,所定义的关系称为父子关系。父子关系在树的结点之间建立了一个层次结构。在这种层次结构中有一个结点具有特殊的地位,这个结点称为该树的根结点,或称为树根。
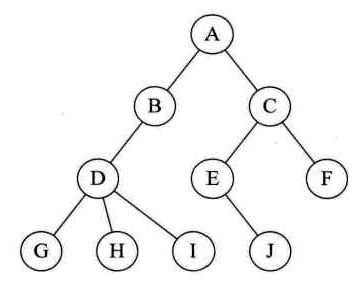
2.树的属性
节点的深度:约定根节点的深度为0,每个节点的深度为该节点到根节点的唯一通路所经过的边的数目。
节点的层次:相同深度的节点属于同一层次。
节点的度(数):节点的孩子总数。
子树:某节点所有后代及其联边称作子树。
高度:一棵树所有节点中深度的最大值即为高度,单个节点的树高度为0,空树高度为-1
叶节点:没有子节点的节点为叶节点,树中必存在叶节点。
3.二叉树
树的种类非常多,二叉树是树的一个特例,尽管作为一个特例,二叉树也具有自身的一般性。
描述:二叉树是一棵树,其中每个节点都不能有多于两个的儿子。
因为同一个父节点下最多有两个子节点,所以也可以用左右区分二叉树的左右子节点。
真二叉树:不含一度节点的二叉树(可以不含节点)
满二叉树:一棵深度为k,且有2^k-1个节点的树是满二叉树。
完全二叉树:对于深度为K的,有n个结点的二叉树,当且仅当其每一个结点都与深度为K的满二叉树中编号从1至n的结点一一对应时称之为完全二叉树。
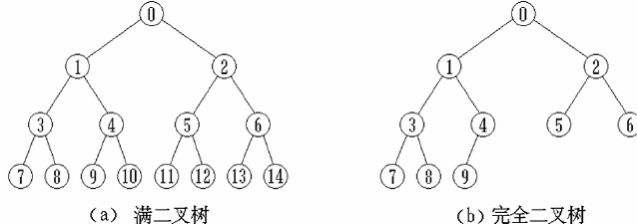
如上图,完全二叉树中的每一个节点都可以对应到相同深度的满二叉树上。
满二叉树一定是完全二叉树,反之则不然。
4.二叉树的实现
从上面我们知道,可以用左右来区分二叉树的两个节点。
二叉树节点的声明:
1 typedef struct TreeNode *PtrNode; 2 typedef struct PtrToNode Tree; 3 4 struct TreeNode 5 { 6 ElementType Element; 7 Tree Left; 8 Tree Right; 9 };
5.多叉树
描述:树中各节点的子节点数目不确定,且每个节点的子节点均不超过K个的有根树,称为K叉树。
多叉树的实现
父节点表示法:
在树结构中,除根节点以外的节点都是有且仅有一个父节点,按照这个思路,只需在每一个节点中储存对应的父节点的指针,就能将所有节点组织起来。
这样一来,节点的声明就可以写成这样。
1 typedef struct TreeNode_Father *PtrNode; 2 typedef struct PtrToNode Tree; 3 4 struct TreeNode_Father 5 { 6 ElementType Element; 7 Tree FatherNode; 8 };
这样实现的多叉树,仅需常数时间O(1)即可确定任一节点的父节点,但查找子节点将不得不遍历所有节点,花费O(n)的时间。
子节点表示法:在每个节点中,储存该节点指向的所有子节点的指针。
这样,子节点的查找将能快速实现,但将所有的节点以这样的方法组织起来却并不容易,因为每个节点的子节点数目并不相同,即每个节点并不具有一般性规律,维护起来将很麻烦。
父节点+子节点表示法:如果结合父节点和子节点表示法的优势,在每个节点中同时记录其父节点和所有子节点,就可以高效地兼顾对父节点和子节点的定位。
然而,当此类树涉及到插入删除操作时,每对一个节点进行操作,就必须要对其相应的子序列进行调整,以维护和更新树的拓扑结构。而线性结构完成这些操作都需要花费大量时间。
长子兄弟法:将树的节点的特征抽象出来,我们发现,每个父节点下面都连接着若干(或0)个子节点,把左起第一个子节点记作FirstChild(长子),后面的子节点分别是上一个子节点的NextSibling(兄弟)。
具体的节点声明如下:
1 typedef struct TreeNode *PtrToNode; 2 3 struct TreeNode 4 { 5 ElementType Element; 6 PtrToNode FirstChild; 7 PtrToNode NextSibling; 8 };
这样实现的一棵树形如下图:
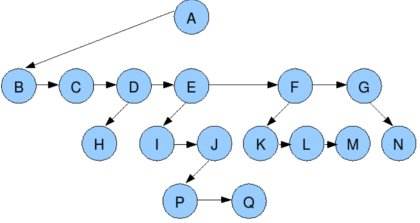
由上我们知道,树结构具有一定的线性特征。
因为同一节点的所有子节点具有线性次序,那么,将长子看作左节点,其他兄弟看作右节点,所有的多叉树都能被看作二叉树。
这种多叉树也叫有序树。
6.BinNode模板类(关于节点的功能)
1 #define BinNodePosi(T) BinNode<T>* //节点位置 2 #define stature(p) ((p) ? (p)->height : -1) //节点高度(与“空树高度为-1”的约定相统一) 3 typedef enum { RB_RED, RB_BLACK} RBColor; //节点颜色 4 5 template <typename T> struct BinNode { //二叉树节点模板类 6 // 成员(为简化描述起见统一开放,读者可根据需要进一步封装) 7 T data; //数值 8 BinNodePosi(T) parent; BinNodePosi(T) lc; BinNodePosi(T) rc; //父节点及左、右孩子,均为指针类型 9 int height; //高度(通用) 10 int npl; //Null Path Length(左式堆,也可直接用height代替) 11 RBColor color; //颜色(红黑树) 12 // 构造函数 13 BinNode() : 14 parent ( NULL ), lc ( NULL ), rc ( NULL ), height ( 0 ), npl ( 1 ), color ( RB_RED ) { } 15 BinNode ( T e, BinNodePosi(T) p = NULL, BinNodePosi(T) lc = NULL, BinNodePosi(T) rc = NULL, 16 int h = 0, int l = 1, RBColor c = RB_RED ) : 17 data ( e ), parent ( p ), lc ( lc ), rc ( rc ), height ( h ), npl ( l ), color ( c ) { } 18 // 操作接口 19 int size(); //统计当前节点后代总数,亦即以其为根的子树的规模 20 BinNodePosi(T) insertAsLC ( T const& ); //作为当前节点的左孩子插入新节点 21 BinNodePosi(T) insertAsRC ( T const& ); //作为当前节点的右孩子插入新节点 22 BinNodePosi(T) succ(); //取当前节点的直接后继 23 template <typename VST> void travLevel ( VST& ); //子树层次遍历 24 template <typename VST> void travPre ( VST& ); //子树先序遍历 25 template <typename VST> void travIn ( VST& ); //子树中序遍历 26 template <typename VST> void travPost ( VST& ); //子树后序遍历 27 // 比较器、判等器(各列其一,其余自行补充),重载运算符 28 bool operator< ( BinNode const& bn ) { return data < bn.data; } //小于 29 bool operator== ( BinNode const& bn ) { return data == bn.data; } //等于 30 /*DSA*/ 31 /*DSA*/BinNodePosi(T) zig(); //顺时针旋转 32 /*DSA*/BinNodePosi(T) zag(); //逆时针旋转 33 };
↑代码来自《数据结构(C++语言版)》 邓俊辉
在后续实现中,将频繁用到二叉树的各种功能,不妨用宏定义的方式将这些常用功能整理归纳。
1 #define IsRoot(x) (!((x).parent)) 2 #define IsLChild(x) (!IsRoot(x)&&(&(x)==(x).parent->lc)) 3 #define IsRChild(x) (!IsRoot(x)&&(&(x)==(x).parent->rc)) 4 #define HasParent(x) (!IsRoot(x)) 5 #define HasLChild(x) ((x).lc) 6 #define HasRChild(x) ((x).rc) 7 #define HasChild(x) (HasLChild(x)||HasRChild(x)) 8 #define HasBothChild(x) (HasLChild(x)&&HasRChild(x)) 9 #define IsLeaf(x) (!HasChild(x)) 10 #define Sibling(p) (IsLChild(*(p))?(p)->parent->rc:(p)->parent->lc) 11 #define Uncle(x) (IsChild(*((x)->parent))?(x)->parent->parent->rc:(x)->parent->parent->lc) 12 #define FromParentTo(x) (IsRoot(x)?_root:(IsChild(x)?(x).parent->lc:(x).parent->rc))
插入节点:
1 template <typename T> BinNodePosi(T) BinNode<T>::insertAsLC(T const& e) 2 {return lc=new BinNode (e,this);}//作为左子节点插入 3 4 template <typename T> BinNodePosi(T) BinNode<T>::insertAsRC(T const& e) 5 {return rc=new BinNode (e,this);}//作为右子节点插入
7.BinTree模板(关于树的功能)
1 #include "BinNode.h" //引入二叉树节点类 2 template <typename T> class BinTree { //二叉树模板类 3 protected: 4 int _size; BinNodePosi(T) _root; //规模、根节点 5 virtual int updateHeight ( BinNodePosi(T) x ); //更新节点x的高度 6 void updateHeightAbove ( BinNodePosi(T) x ); //更新节点x及其祖先的高度 7 public: 8 BinTree() : _size ( 0 ), _root ( NULL ) { } //构造函数 9 ~BinTree() { if ( 0 < _size ) remove ( _root ); } //析构函数 10 int size() const { return _size; } //规模 11 bool empty() const { return !_root; } //判空 12 BinNodePosi(T) root() const { return _root; } //树根 13 BinNodePosi(T) insertAsRoot ( T const& e ); //插入根节点 14 BinNodePosi(T) insertAsLC ( BinNodePosi(T) x, T const& e ); //e作为x的左孩子(原无)插入 15 BinNodePosi(T) insertAsRC ( BinNodePosi(T) x, T const& e ); //e作为x的右孩子(原无)插入 16 BinNodePosi(T) attachAsLC ( BinNodePosi(T) x, BinTree<T>* &T ); //T作为x左子树接入 17 BinNodePosi(T) attachAsRC ( BinNodePosi(T) x, BinTree<T>* &T ); //T作为x右子树接入 18 int remove ( BinNodePosi(T) x ); //删除以位置x处节点为根的子树,返回该子树原先的规模 19 BinTree<T>* secede ( BinNodePosi(T) x ); //将子树x从当前树中摘除,并将其转换为一棵独立子树 20 template <typename VST> //操作器 21 void travLevel ( VST& visit ) { if ( _root ) _root->travLevel ( visit ); } //层次遍历 22 template <typename VST> //操作器 23 void travPre ( VST& visit ) { if ( _root ) _root->travPre ( visit ); } //先序遍历 24 template <typename VST> //操作器 25 void travIn ( VST& visit ) { if ( _root ) _root->travIn ( visit ); } //中序遍历 26 template <typename VST> //操作器 27 void travPost ( VST& visit ) { if ( _root ) _root->travPost ( visit ); } //后序遍历 28 bool operator< ( BinTree<T> const& t ) //比较器(其余自行补充) 29 { return _root && t._root && lt ( _root, t._root ); } 30 bool operator== ( BinTree<T> const& t ) //判等器 31 { return _root && t._root && ( _root == t._root ); } 32 /*DSA*/ 33 /*DSA*/void stretchToLPath() { stretchByZag ( _root ); } //借助zag旋转,转化为左向单链 34 /*DSA*/void stretchToRPath() { stretchByZig ( _root, _size ); } //借助zig旋转,转化为右向单链 35 }; //BinTree
高度更新:
二叉树任一节点的高度,都等于其子节点的最大高度+1
当某一节点的高度发生改变时,其所有祖先的高度都将发生改变。
那么,我们可以从当前节点(高度首先发生变化的节点)开始,沿着parent指针的方向,向上回溯,依次更新其所有祖先的高度。
1 template <typename T> int BinTree<T>::updateHeight ( BinNodePosi(T) x ) //更新节点x高度 2 { return x->height = 1 + max ( stature ( x->lc ), stature ( x->rc ) ); } //具体规则,因树而异 3 4 template <typename T> void BinTree<T>::updateHeightAbove ( BinNodePosi(T) x ) //更新高度 5 { while ( x ) { updateHeight ( x ); x = x->parent; } } //从x出发,覆盖历代祖先。可优化
节点插入:
每次插入记得更新树的高度和全树规模
1 template <typename T> BinNodePosi(T) BinTree<T>::insertAsRoot ( T const& e ) 2 { _size = 1; return _root = new BinNode<T> ( e ); } //将e当作根节点插入空的二叉树 3 4 template <typename T> BinNodePosi(T) BinTree<T>::insertAsLC ( BinNodePosi(T) x, T const& e ) 5 { _size++; x->insertAsLC ( e ); updateHeightAbove ( x ); return x->lc; } //e插入为x的左孩子 6 7 template <typename T> BinNodePosi(T) BinTree<T>::insertAsRC ( BinNodePosi(T) x, T const& e ) 8 { _size++; x->insertAsRC ( e ); updateHeightAbove ( x ); return x->rc; } //e插入为x的右孩子
子树接入:
将要接入的子树的根节点赋给某节点的子节点
1 template <typename T> //二叉树子树接入算法:将S当作节点x的左子树接入,S本身置空 2 BinNodePosi(T) BinTree<T>::attachAsLC ( BinNodePosi(T) x, BinTree<T>* &S ) { //x->lc == NULL 3 if ( x->lc = S->_root ) x->lc->parent = x; //接入 4 _size += S->_size; updateHeightAbove ( x ); //更新全树规模与x所有祖先的高度 5 S->_root = NULL; S->_size = 0; release ( S ); S = NULL; return x; //释放原树,返回接入位置 6 } 7 8 template <typename T> //二叉树子树接入算法:将S当作节点x的右子树接入,S本身置空 9 BinNodePosi(T) BinTree<T>::attachAsRC ( BinNodePosi(T) x, BinTree<T>* &S ) { //x->rc == NULL 10 if ( x->rc = S->_root ) x->rc->parent = x; //接入 11 _size += S->_size; updateHeightAbove ( x ); //更新全树规模与x所有祖先的高度 12 S->_root = NULL; S->_size = 0; release ( S ); S = NULL; return x; //释放原树,返回接入位置 13 }
子树删除:
1 template <typename T> //删除二叉树中位置x处的节点及其后代,返回被删除节点的数值 2 int BinTree<T>::remove ( BinNodePosi(T) x ) { //assert: x为二叉树中的合法位置 3 FromParentTo ( *x ) = NULL; //切断来自父节点的指针 4 updateHeightAbove ( x->parent ); //更新祖先高度 5 int n = removeAt ( x ); _size -= n; return n; //删除子树x,更新规模,返回删除节点总数 6 } 7 template <typename T> //删除二叉树中位置x处的节点及其后代,返回被删除节点的数值 8 static int removeAt ( BinNodePosi(T) x ) { //assert: x为二叉树中的合法位置 9 if ( !x ) return 0; //递归基:空树 10 int n = 1 + removeAt ( x->lc ) + removeAt ( x->rc ); //递归释放左、右子树 11 release ( x->data ); release ( x ); return n; //释放被摘除节点,并返回删除节点总数 12 }
子树分离:
1 template <typename T> //二叉树子树分离算法:将子树x从当前树中摘除,将其封装为一棵独立子树返回 2 BinTree<T>* BinTree<T>::secede ( BinNodePosi(T) x ) { //assert: x为二叉树中的合法位置 3 FromParentTo ( *x ) = NULL; //切断来自父节点的指针 4 updateHeightAbove ( x->parent ); //更新原树中所有祖先的高度 5 BinTree<T>* S = new BinTree<T>; S->_root = x; x->parent = NULL; //新树以x为根 6 S->_size = x->size(); _size -= S->_size; return S; //更新规模,返回分离出来的子树 7 }
8.二叉树的遍历方法
我们根据访问根节点的次序来分类二叉树的遍历方法。
根节点(V),左子节点(L),右子节点(R)
先序遍历:V | L | R
中序遍历:L | V | R
后序遍历:L | R | V
层序遍历:从左到右按层遍历
9.先序遍历
递归版本:
由于二叉树本身的定义便带有递归的性质,所以很容易得出递归解法
1 template <typename T,typename VST>//元素类型,操作器 2 void travPre_R (BinNodePosi(T) x,VST& visit) 3 { 4 if(!x) return; 5 visit(x->data); 6 travPre_R(x->lc,visit); 7 travPre_R(x->rc,visit); 8 }
迭代版本1:
因为递归版本的时间、空间复杂度的常系数较大,所以虽然其整体复杂度只有O(n),但实际应用时效率不高。
将递归改写为迭代可以有效将时间空间复杂度常系数缩小。
观察递归版本可知,该实现是尾递归的形式,改写成迭代很容易。
1 template <typename T,typename VST>//元素类型,操作器 2 void travPre_I1(BinNodePosi(T) x,VST& visit) 3 { 4 Stack<BinNodePosi(T)> S;//辅助栈 5 if(x) S.push(x);//根节点入栈 6 while(!S.empty())//栈空前一直循环 7 { 8 x=S.pop(); 9 visit(x->data); 10 if(HasRChild(*x))//入栈顺序是先右后左 11 S.push(x->rc); 12 if(HasLChild(*x)) 13 S.push(x->lc);//出栈顺序是先左后右 14 } 15 }
迭代版本2:
版本1并不适用于尾递归以外的场景,当我们试图将这种思路推广到中序遍历和后序遍历时将遇到困难。
另一个思路是,观察二叉树的遍历顺序,可以得知,遍历开始时,总是从根节点出发,访问左子节点,然后访问左子节点的左子节点... ...直到遇到一个节点没有左子节点时,将这个节点记作v,访问v的右子节点,然后向上回溯,访问v的父节点的右子节点(即v的兄弟节点),然后从v的兄弟节点出发,重复“访问左子节点,向上回溯”的过程... ...
简而言之,从当前节点开始,沿左分支不断深入,直到没有左节点的分支,从该节点开始自下而上访问其右子树。访问右子树的方式与上面相同。
代码实现:
1 //从当前节点出发,沿左分支不断深入,直至没有左分支的节点;沿途节点遇到后立即访问 2 template <typename T, typename VST> //元素类型、操作器 3 static void visitAlongLeftBranch ( BinNodePosi(T) x, VST& visit, Stack<BinNodePosi(T)>& S ) { 4 while ( x ) { 5 visit ( x->data ); //访问当前节点 6 S.push ( x->rc ); //右孩子入栈暂存(可优化:通过判断,避免空的右孩子入栈) 7 x = x->lc; //沿左分支深入一层 8 } 9 } 10 11 template <typename T, typename VST> //元素类型、操作器 12 void travPre_I2 ( BinNodePosi(T) x, VST& visit ) { //二叉树先序遍历算法(迭代版#2) 13 Stack<BinNodePosi(T)> S; //辅助栈 14 while ( true ) { 15 visitAlongLeftBranch ( x, visit, S ); //从当前节点出发,逐批访问 16 if ( S.empty() ) break; //直到栈空 17 x = S.pop(); //弹出下一批的起点 18 } 19 }
后序遍历可以直接沿用迭代版本2的思路。
10.中序遍历
递归版本:
和前序遍历一样,递归版本可以很简洁地实现
1 template <typename T,typename VST>//元素类型,操作器 2 void travIn_R (BinNodePosi(T) x,VST& visit) 3 { 4 if(!x) return; 5 travIn_R(x->lc,visit); 6 visit(x->data); 7 travIn_R(x->rc,visit); 8 }
不同的是,中序遍历并不是尾递归,不能将其直接改写为迭代版本。
迭代版本1:
中序遍历从根节点开始,首先访问的却不是根节点,而是整棵树最左边的叶节点。控制权由根节点开始,依次向下交给左子节点,直到某节点没有左子节点,访问该节点,然后访问其右子树(如果有的话),然后向上回溯到该节点的父节点,访问其右子树... ...
概括起来就是,中序遍历可以沿其左通路,以沿途节点为界,将整个中序遍历的过程划分为d+1段。
每一段的过程是,访问左通路上的某节点,再遍历其对应的右子树。一段完成以后,转到左通路上的上一个节点,重复该过程。
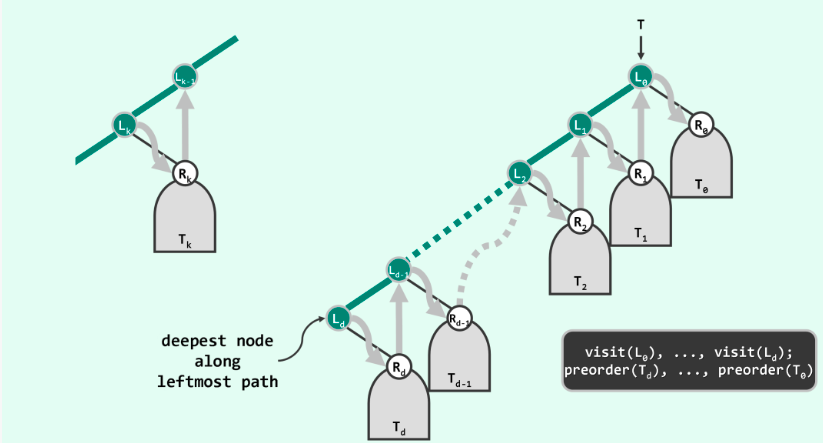
↑中序遍历过程的分解
具体代码实现为:
1 template <typename T> //从当前节点出发,沿左分支不断深入,直至没有左分支的节点 2 static void goAlongLeftBranch ( BinNodePosi(T) x, Stack<BinNodePosi(T)>& S ) { 3 while ( x ) { S.push ( x ); x = x->lc; } //当前节点入栈后随即向左侧分支深入,迭代直到无左孩子 4 } 5 6 template <typename T, typename VST> //元素类型、操作器 7 void travIn_I1 ( BinNodePosi(T) x, VST& visit ) { //二叉树中序遍历算法(迭代版#1) 8 Stack<BinNodePosi(T)> S; //辅助栈 9 while ( true ) { 10 goAlongLeftBranch ( x, S ); //从当前节点出发,逐批入栈 11 if ( S.empty() ) break; //直至所有节点处理完毕 12 x = S.pop(); visit ( x->data ); //弹出栈顶节点并访问之 13 x = x->rc; //转向右子树 14 } 15 }
首先调用函数goAlongLeftBranch,沿左通路向下,到达最左侧的叶节点,利用辅助栈记录沿途的节点,用后进先出的性质实现实际的访问顺序。
直接后继:中序遍历的大致思路还是将树这样一种非线性结构转化为线性结构,使其遍历按照线性的顺序,而一旦树具有了线性的顺序,和向量链表等一样,二叉树的节点一样具有其前驱和后继,而确定二叉树节点的直接后继,将在后续算法中起到重要的作用。
代码实现如下:
1 template <typename T> BinNodePosi(T) BinNode<T>::succ() { //定位节点v的直接后继 2 BinNodePosi(T) s = this; //记录后继的临时变量 3 if ( rc ) { //若有右孩子,则直接后继必在右子树中,具体地就是 4 s = rc; //右子树中 5 while ( HasLChild ( *s ) ) s = s->lc; //最靠左(最小)的节点 6 } else { //否则,直接后继应是“将当前节点包含于其左子树中的最低祖先”,具体地就是 7 while ( IsRChild ( *s ) ) s = s->parent; //逆向地沿右向分支,不断朝左上方移动 8 s = s->parent; //最后再朝右上方移动一步,即抵达直接后继(如果存在) 9 } 10 return s; 11 }
迭代版本2:对迭代版本1进行改写简化
1 template <typename T, typename VST> //元素类型、操作器 2 void travIn_I2 ( BinNodePosi(T) x, VST& visit ) { //二叉树中序遍历算法(迭代版#2) 3 Stack<BinNodePosi(T)> S; //辅助栈 4 while ( true ) 5 if ( x ) { 6 S.push ( x ); //根节点进栈 7 x = x->lc; //深入遍历左子树 8 } else if ( !S.empty() ) { 9 x = S.pop(); //尚未访问的最低祖先节点退栈 10 visit ( x->data ); //访问该祖先节点 11 x = x->rc; //遍历祖先的右子树 12 } else 13 break; //遍历完成 14 }
迭代版本3:
以上两个版本都需要用到辅助栈,而在最坏情况下,辅助栈所占用的空间规模将和二叉树的规模相当,为此,借助parent指针和succ(直接后继定位函数),可以有效节约空间开销。
时间复杂度有所牺牲。
1 template <typename T, typename VST> //元素类型、操作器 2 void travIn_I3 ( BinNodePosi(T) x, VST& visit ) { //二叉树中序遍历算法(迭代版#3,无需辅助栈) 3 bool backtrack = false; //前一步是否刚从右子树回溯——省去栈,仅O(1)辅助空间 4 while ( true ) 5 if ( !backtrack && HasLChild ( *x ) ) //若有左子树且不是刚刚回溯,则 6 x = x->lc; //深入遍历左子树 7 else { //否则——无左子树或刚刚回溯(相当于无左子树) 8 visit ( x->data ); //访问该节点 9 if ( HasRChild ( *x ) ) { //若其右子树非空,则 10 x = x->rc; //深入右子树继续遍历 11 backtrack = false; //并关闭回溯标志 12 } else { //若右子树空,则 13 if ( ! ( x = x->succ() ) ) break; //回溯(含抵达末节点时的退出返回) 14 backtrack = true; //并设置回溯标志 15 } 16 } 17 }
用一个布尔类型的变量backtrack指示此前是否已经做过一次自下而上的回溯,节省栈的空间开销。
但也因此无法直接获得回溯时的访问节点的顺序(不能借助栈后进先出的性质),需要反复调用succ接口,不断确定当前节点的直接后继,以确定访问顺序。
当succ返回的直接后继为NULL时,也就意味着遍历完成了。
11.层次遍历
层次遍历非常好理解,从左往右逐层向下访问节点即可。
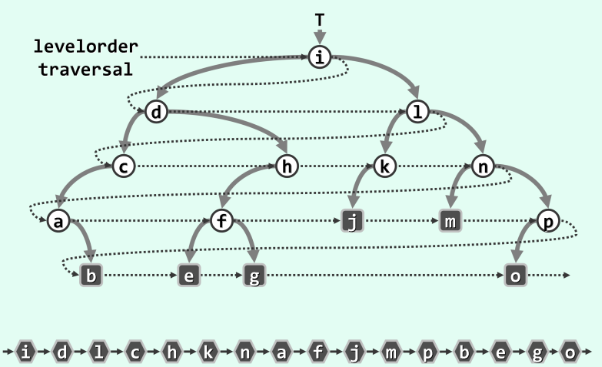
上面的先序遍历中序遍历采用了辅助栈,而层次遍历则采用队列结构。
1 /*DSA*/#include "../queue/queue.h" //引入队列 2 template <typename T> template <typename VST> //元素类型、操作器 3 void BinNode<T>::travLevel ( VST& visit ) { //二叉树层次遍历算法 4 Queue<BinNodePosi(T)> Q; //辅助队列 5 Q.enqueue ( this ); //根节点入队 6 while ( !Q.empty() ) { //在队列再次变空之前,反复迭代 7 BinNodePosi(T) x = Q.dequeue(); visit ( x->data ); //取出队首节点并访问之 8 if ( HasLChild ( *x ) ) Q.enqueue ( x->lc ); //左孩子入队 9 if ( HasRChild ( *x ) ) Q.enqueue ( x->rc ); //右孩子入队 10 } 11 }
12.二叉树的应用
表达式树,PFC编码树,Huffman编码树
挖坑待填。
填坑,数据结构应用 - 二叉树
参考资料【1】《数据结构(C++语言版)》 邓俊辉
【2】《数据结构与算法分析——C语言描述》 Mark Allen Weiss