经过一年多的断断续续的研究学习,终于有点像样的了,从学习计算机那天就在想,有朝一日我也能独立编一个可以让自己在其中自由畅游的空间的梦想,也算是开了个头,所花费的时间也算没有白费,学习思路和方向找对了,我感到很高兴很满意。
让我来把这一刻记录下来。
创建了一个空间,一个40*40*40的空间点矩阵,每点相距10个单位,在其中有一个平面,平面上树立了一个由2个拉长的三角形以十字交叉组成的树木模型。现在摄像机可以通过键盘和鼠标在空间自由漫游。目前已经建立了齐次坐标类、矩阵运算类、摄像机类、GL窗口类,矩阵类还需要进行补充三轴对齐矩阵设置函数,准备做一些整理后建一个模型类,好让外部程序很轻松地操作模型。
为了便于理解镜头焦距和效果,系统被设定都是以的135胶片尺寸作为投影面,因此,所有镜头焦距都是对应标准相机的。
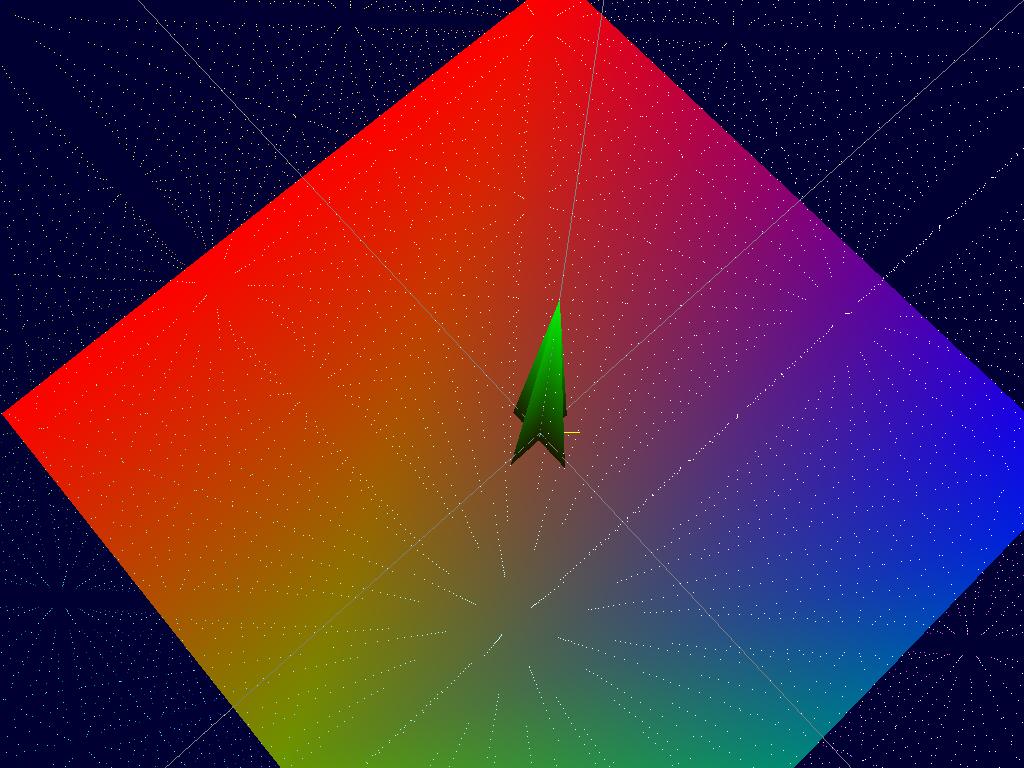
第一张,以28mm镜头斜视
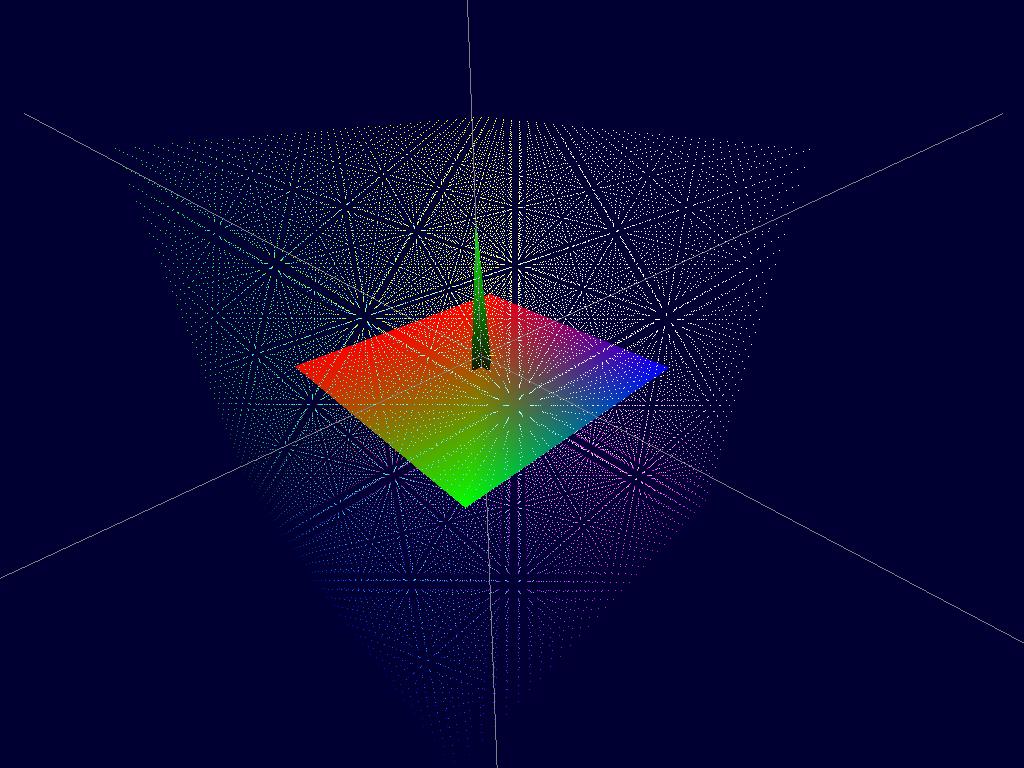
第二张,以超广角透视效果观察,因为没有做显示,所以不知道具体是什么焦距。
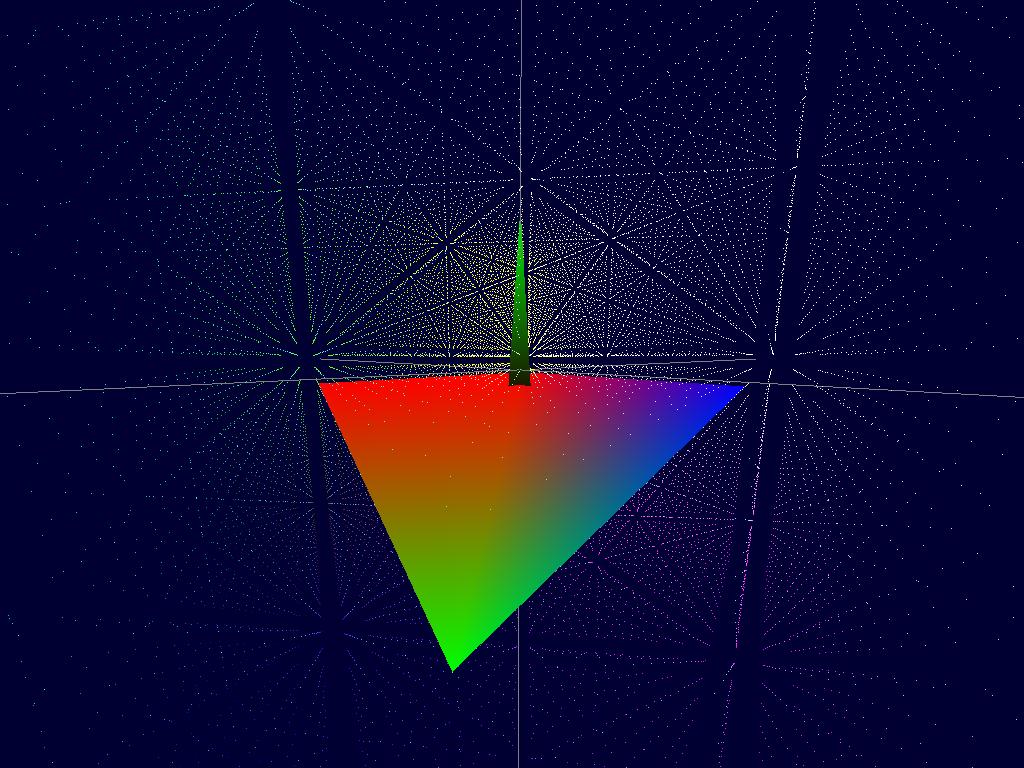
第三张是远距离用长焦镜观察的效果,可以看到所有顶点都挤在一起了,方形平面也显得“扁”了。
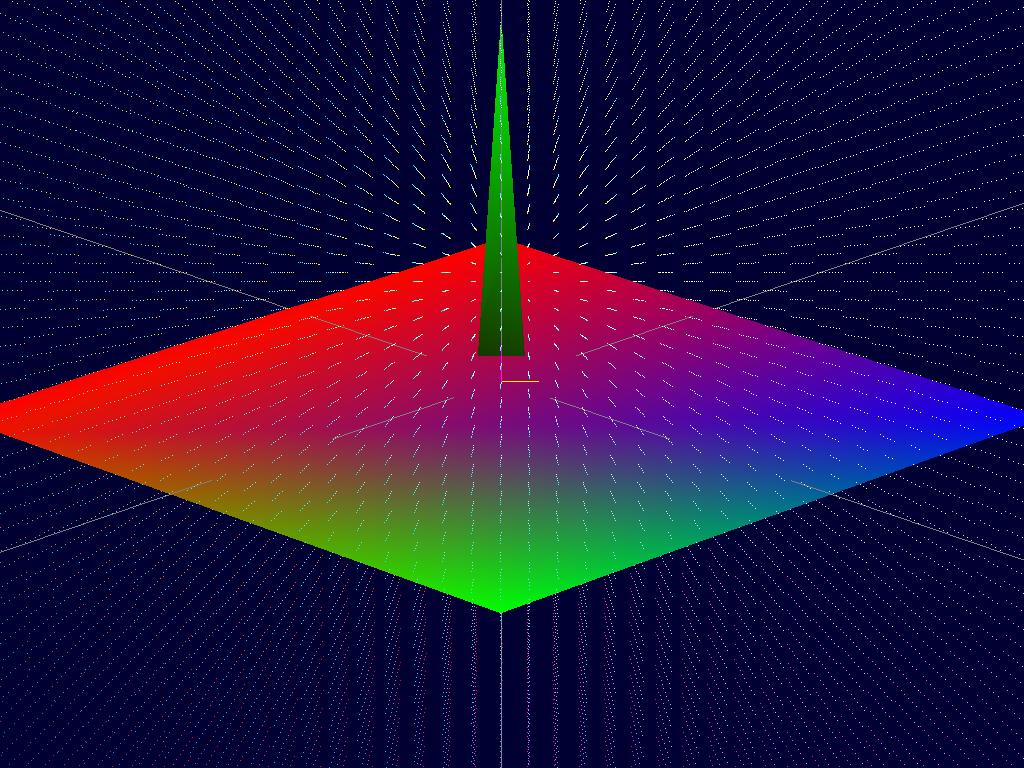
第四张是以接近50MM标准镜观察的俯视图,可以看到十字相交的两个三角形,很多老游戏中的树木和草都是这样建模的。