大家好,计算机视觉life公众号推出的视频课程《全网最详细的ORB-SLAM2精讲:原理推导+逐行代码分析》正式上线啦!
ORB-SLAM2是视觉SLAM中特征点法的代表作,也是首个同时支持单目、双目、RGBD相机的超实用开源SLAM方案。
整个代码结构清晰,内容完整,涵盖实时跟踪、局部地图、回环检测、BA优化,工程技巧等,适合二次开发,很多公司在此基础上研发不同应用领域的SLAM解决方案,是学习视觉SLAM的必备基础。适用于自动驾驶、增强现实、机器人、三维重建等领域。
我们的系列课程以详细注释的代码为基础,逐行进行代码讲解,并加入了代码勘误和优化;同时注重夯实基础,对疑难点进行了关键公式提炼与推导,绘制了形象化的走心的示意图,带你深度掌握实际项目细节。让初学者不再头疼,快速掌握理论和实践,避免采坑。同时有专属技术交流答疑群,让你不再孤独的探索。
主讲人:小六,中科院博士毕业、多年VSLAM、三维视觉从业经验、计算机视觉life公众号创始人。讲课不枯燥,答疑很周到。
为什么要学习该课程?
- ORB-SLAM2是视觉SLAM中特征点法的开源代表作,同时支持单目、双目、RGBD相机,涵盖视觉SLAM领域重要知识,如实时跟踪、局部地图、回环检测、BA优化,工程技巧。适合二次开发,视觉SLAM工作必备,为学习ORB-SLAM3打基础
- 代码量大,自学入门难度大,通过课程学习,结合详细代码注释和独家示意图,可以快速掌握代码细节和技术原理,帮助学员节省大量入门时间,踏实掌握SLAM工程经验
- 课程交流群讲师、助教每日答疑,及时解决课程中遇到的问题
- 助教及时批改作业,每周针对作业进行讲评
- 讲师课程全程陪伴,高效解决问题
- 优秀学员颁发神秘大奖
哪些人适合学习该课程?
- 适合领域:机器人、无人机、AR、自动驾驶
- 高年级本科生、硕博研究生、相关领域工程师
- 理工科专业即可(如自动化、计算机、机械、通信、电子、数学、物理等)
- 一定的C/C++编程基础
- 学习过线性代数相关知识
- 正在或已经阅读《视觉SLAM十四讲》
学完课程可以掌握哪些技能?
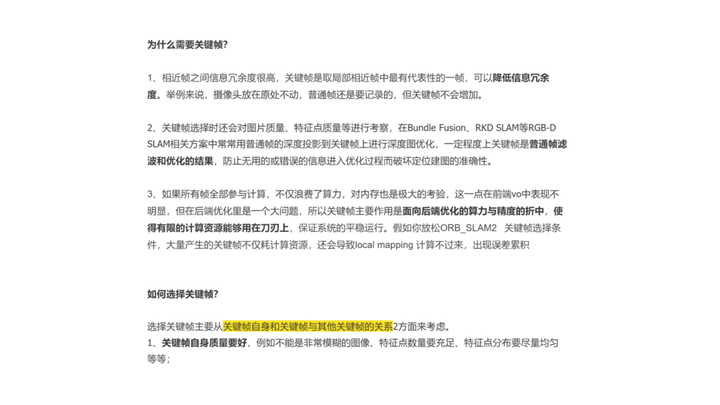
- 掌握视觉SLAM中重难点:特征均匀化、共视图、关键帧、EPnP、BoW、Sim3、spanning tree、essential graph、local/global BA等,具备扎实的VSLAM理论实践基础
- 掌握单目初始化、跟踪、局部建图、闭环检测矫正原理及代码实现,吃透ORB-SLAM2核心算法
- 掌握CMake、多线程、编程调试等项目实战经验,具备视觉SLAM项目研发能力
上课方式及服务内容
- 2021年1月4日21:00正式开课,历时3个月(不包括春节)
- 每周5个录播视频(总时长约2个小时)
- 每周作业(选择/问答/编程等),难易适中
- 每晚9-10点QQ群集中答疑、助教定期讲解作业
- 不定期直播(论文解读/代码分析)
- 课程有效期一年,有效期内可随时观看视频。注意课程答疑/作业批改讲评仅在开课至结课期间
课程现在开启了限时拼团优惠,越拼越便宜!已有400+人购买,需要的小伙伴抓紧啦!
微信扫描二维码购买:

如对课程有任何疑问,欢迎加入课程咨询群!

关于课程的详细介绍和亮点见:
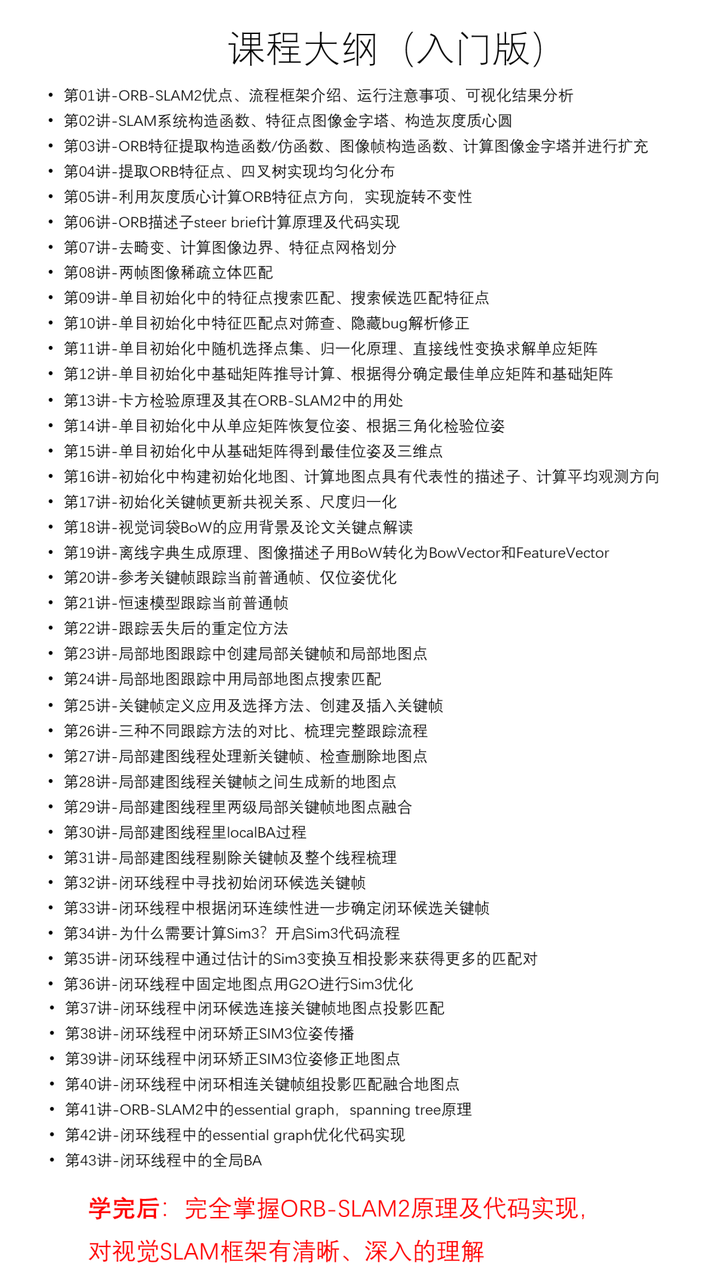
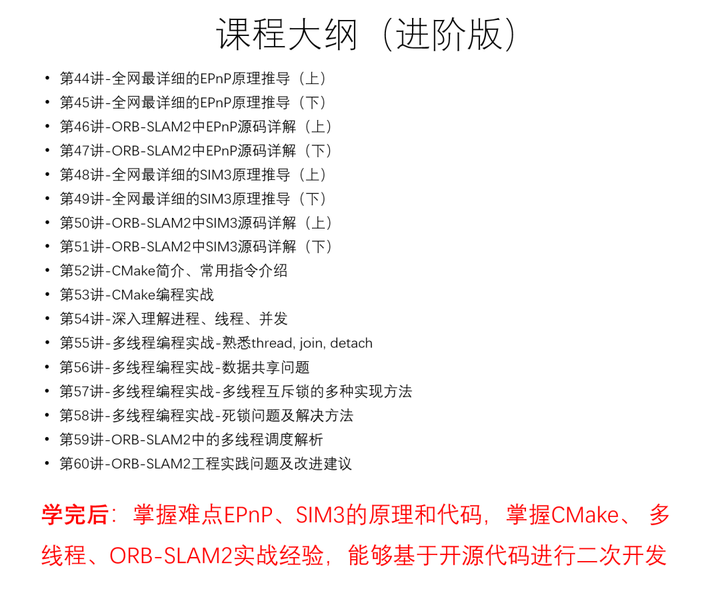
课程大纲
课程现在开启了限时拼团优惠,越拼越便宜!已有400+人购买,需要的小伙伴抓紧啦!
微信扫描二维码购买:
如对课程有任何疑问,欢迎加入课程咨询群!
再总结下课程亮点:
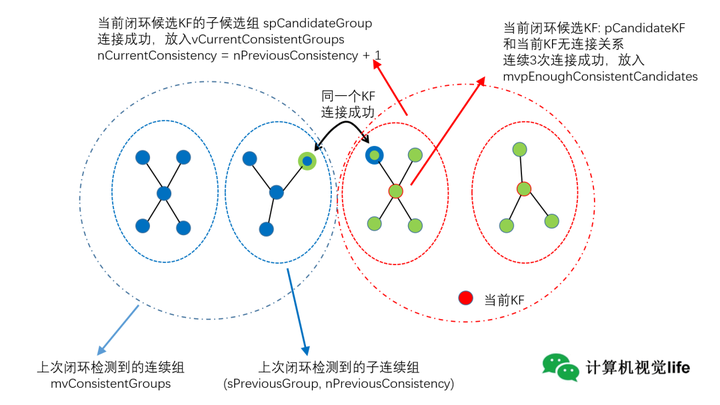
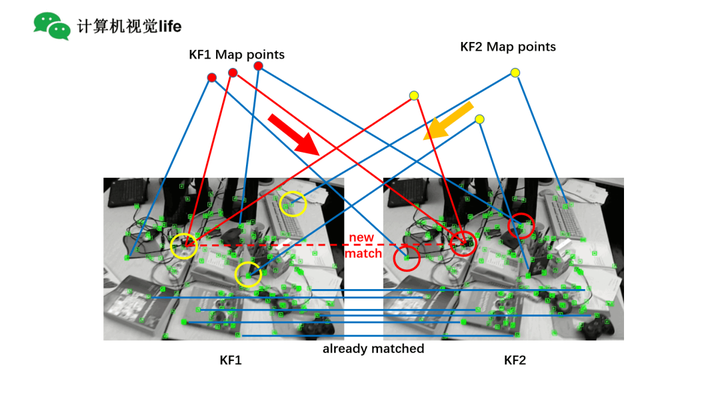
1、超级走心的独家原理图,快速理解纷繁复杂的源码

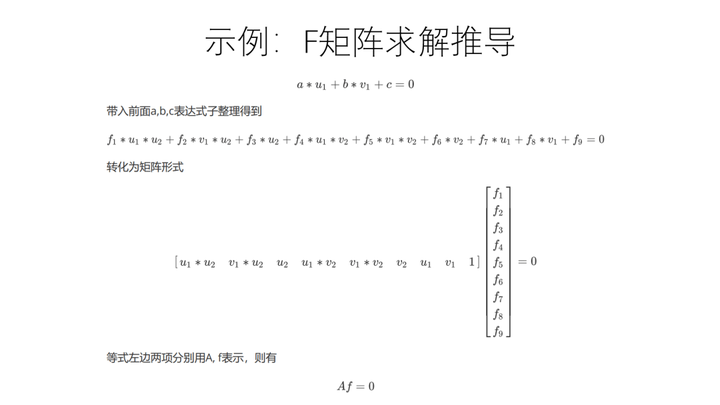
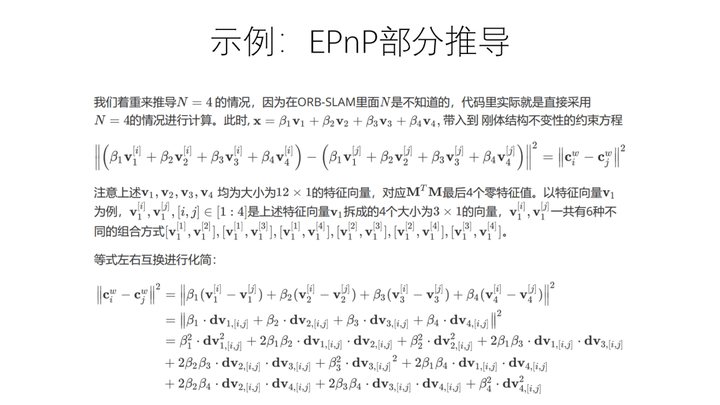
2、硬核清晰的关键原理推导,直达问题本质
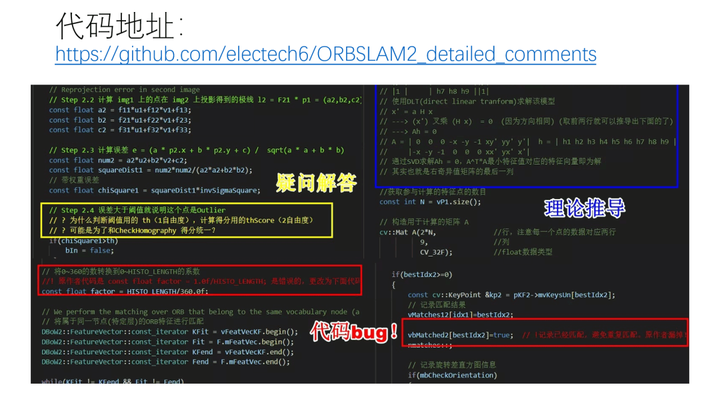
3、超详细保姆级注释的源码,让你完全吃透代码
代码地址:https://github.com/electech6/ORBSLAM2_detailed_comments
4、重点知识面适当拓展,知其然也知其所以然
5、互助友爱的交流社区,学员专属福利
大家可以用PC、手机学习观看视频,还会有助教答疑和作业练习,直播、线下聚会等活动。课程有效期1年。
2021年1月4日晚9点正式开课,我们带领大家一起从头开始学习,历时3个月。让你快速从小白变成有经验的VSLAM业内人士。
课程现在开启了限时拼团优惠,越拼越便宜!已有400+人购买,需要的小伙伴抓紧啦!
微信扫描二维码购买:
如对课程有任何疑问,欢迎加入课程咨询群!