一、rqt_console 和rqt_logger_level
1、作用:
rqt_console依据ROS编译日志,输出节点信息
rqt_logger_level可以改变节点的警告出差的警告等级
2、使用方法
(1)打开rqt_console rqt_logger_level
rosrun rqt_console rqt_console
rosrun rqt_logger_level rqt_logger_level
(2)在新的终端,打开turtle
rosrun turtlesim turtlesim_node
在窗口会出现

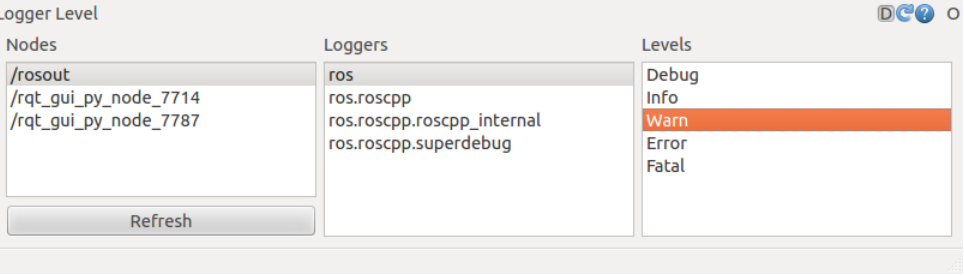
然后我们改变logger level
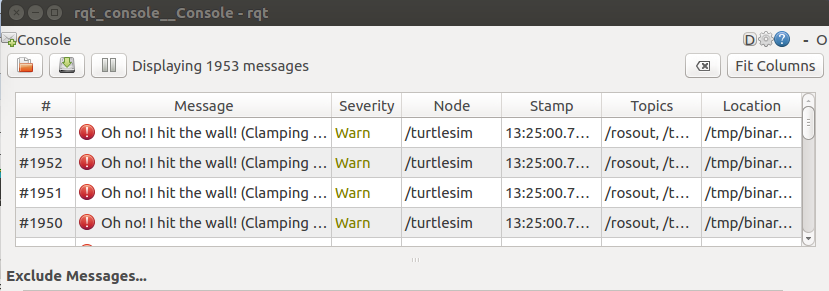
(3)然后我们执行一条会出错的命令
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0,y: 0.0,z: 0.0}}'
会报错,撞到墙壁。
3、logger levels
有五个优先报错级别,从上到下,依次由高到低
Fatal Error Warn Info Debug
二、roslaunch
1、作用:
启动launch文件
2、语法
roslaunch [package] [filename.launch]
3、一个demo
(1)打开beginner_tutorials
cd ~/catkin_ws source devel/setup.bash roscd beginner_tutorials
(2)新建一个目录,用来存放launch文件(是一个好的习惯,可以不必这么做)
mkdir launch
cd launch
(3)新建一个launch文件:turtlemimic.launch
Toggle line numbers 1 <launch> 2 3 <group ns="turtlesim1"> 4 <node pkg="turtlesim" name="sim" type="turtlesim_node"/> 5 </group> 6 7 <group ns="turtlesim2"> 8 <node pkg="turtlesim" name="sim" type="turtlesim_node"/> 9 </group> 10 11 <node pkg="turtlesim" name="mimic" type="mimic"> 12 <remap from="input" to="turtlesim1/turtle1"/> 13 <remap from="output" to="turtlesim2/turtle1"/> 14 </node> 15 16 </launch>
(4)调用launch文件
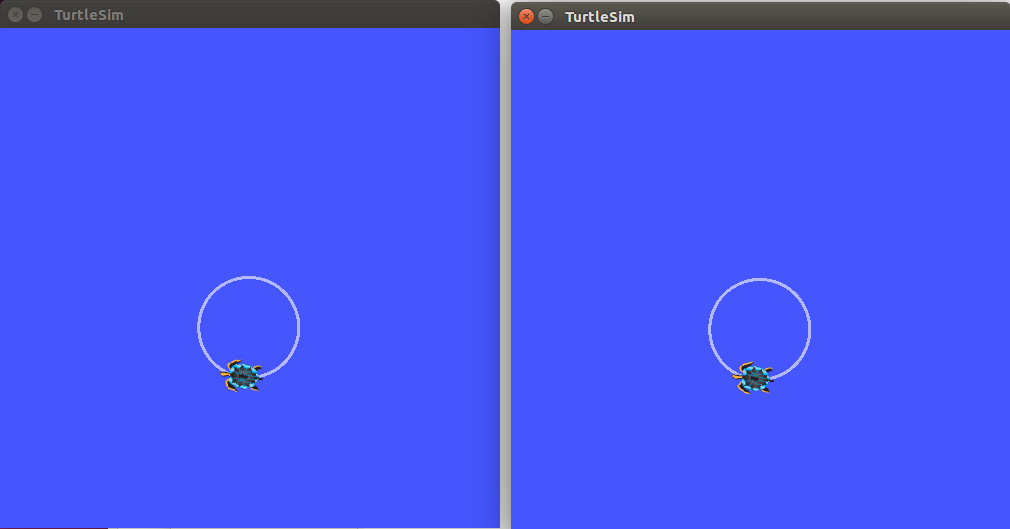
roslaunch beginner_tutorials turtlemimic.launch
再让其运动,第二个会复制第一个进行运动
rostopic pub /turtlesim1/turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, -1.8]'