上一篇介绍了HashMap的数据结构:数组+单链表(jdk 1.8,当链表长度达到8后,链表将会被转换为红黑树结构)。日常开发中我们经常使用,随着业务规模、场景的不断复杂发展,多线程开发越来越多的进入到我们日常开发中,那么问题就来了,HashMap是线程安全的吗?答案是否定的,保证HashMap的线程安全需要我们开发中自行维护。那么有没有线程安全的集合框架呢?答案是肯定的,java.util包下的HashTab类,就是一种线程安全的Map容器。
Hashtabe
为了更快速的理解Hashtabe,接下来就结合HashMap做下对比,帮助我们更直观的认识。
1、Hashtabe默认的容量是11,而HashMap是16
2、Hashtabe数组表是一旦创建就构造,属于饿汉模式,而HashMap是在第一次put时的resize构造
3、Hashtabe数据结构是数组+单向链表,而HashMap则是数组+单向链表+红黑树
4、Hashtabe中链表Node节点采用头插法,而HashMap则是采用尾插法
5、Hashtabe通过对put、get、remove、size等方法添加synchronized关键字保证线程安全,而HashMap本身并没有保证线程安全的相关处理,需要业务使用时自行保障
6、Hashtabe的键值均不能为null,而HashMap支持键值为null
下面我们看一下Hashtabe的源码,验证一下我们上面提到的内容,首先我们看一下构造方法:
public Hashtable(int initialCapacity, float loadFactor) { if (initialCapacity < 0) throw new IllegalArgumentException("Illegal Capacity: "+ initialCapacity); if (loadFactor <= 0 || Float.isNaN(loadFactor)) throw new IllegalArgumentException("Illegal Load: "+loadFactor); if (initialCapacity==0) initialCapacity = 1; this.loadFactor = loadFactor;
// 对数组进行初始化 table = new Entry<?,?>[initialCapacity]; // 扩容阈值 = 数组容量 * 负载系数;最大值为:0x7fffffff - 8 + 1 threshold = (int)Math.min(initialCapacity * loadFactor, MAX_ARRAY_SIZE + 1); } public Hashtable(int initialCapacity) { this(initialCapacity, 0.75f); } public Hashtable() { this(11, 0.75f); } public Hashtable(Map<? extends K, ? extends V> t) { this(Math.max(2*t.size(), 11), 0.75f); putAll(t); }
通过源码我们可以看到,无参构造方法中,系统默认为我们定义了数组的容量和负载系数,并且在调用构造方法时,系统会默认为我们创建初始数组,这里和HashMap有所不同,大家可以做下对比,便于更好的记忆。
下面我们以put方法为例,分析一下上面我们提到的几个点
public synchronized V put(K key, V value) { // 检查值value是否为空 if (value == null) { throw new NullPointerException(); } // 检查键是否存在于hash表中 Entry<?,?> tab[] = table; // 键不能为空,否则会导致空指针 int hash = key.hashCode(); // 这里获取key数组下标有别于HashMap int index = (hash & 0x7FFFFFFF) % tab.length; @SuppressWarnings("unchecked") Entry<K,V> entry = (Entry<K,V>)tab[index]; // 遍历数组当前节点的单链表查询键是否已存在 for(; entry != null ; entry = entry.next) { if ((entry.hash == hash) && entry.key.equals(key)) { V old = entry.value; // 键值存在直接更新,并返回原键值 entry.value = value; return old; } } // 当键不存在时,将键值插入指定链表中 addEntry(hash, key, value, index); return null; } private void addEntry(int hash, K key, V value, int index) { modCount++; // 检查数组长度是否达到阈值,达到阈值对数组进行扩容 Entry<?,?> tab[] = table; if (count >= threshold) { // Rehash the table if the threshold is exceeded rehash(); tab = table; hash = key.hashCode(); // 数组扩容后,以新数组长度计算键的数组下标 index = (hash & 0x7FFFFFFF) % tab.length; } // 以键值创建新的Node节点,将数组该位置的原头节点,设置为新节点的next @SuppressWarnings("unchecked") Entry<K,V> e = (Entry<K,V>) tab[index]; tab[index] = new Entry<>(hash, key, value, e); count++; } protected void rehash() { int oldCapacity = table.length; Entry<?,?>[] oldMap = table; // 创建一个数组容量扩大2倍 + 1的新数组 int newCapacity = (oldCapacity << 1) + 1; if (newCapacity - MAX_ARRAY_SIZE > 0) { if (oldCapacity == MAX_ARRAY_SIZE) // Keep running with MAX_ARRAY_SIZE buckets return; newCapacity = MAX_ARRAY_SIZE; } Entry<?,?>[] newMap = new Entry<?,?>[newCapacity]; modCount++; // 更新新数组的阈值 threshold = (int)Math.min(newCapacity * loadFactor, MAX_ARRAY_SIZE + 1); table = newMap; // 循环遍历进行数组数据迁移 for (int i = oldCapacity ; i-- > 0 ;) { for (Entry<K,V> old = (Entry<K,V>)oldMap[i] ; old != null ; ) { Entry<K,V> e = old; old = old.next; int index = (e.hash & 0x7FFFFFFF) % newCapacity; e.next = (Entry<K,V>)newMap[index]; newMap[index] = e; } } }
到这里大家应该对于Hashtable已经有了一个清晰的认识了,这里提到synchronized关键字,我们知道synchronized有两个维度:1、类维度加锁;2、对象维度加锁,Hashtabe采用的是什么维度呢?答案是对象维度加锁。这样做有产生什么样的问题呢?这要简单聊一下多线程的使用场景,我们为什么要用多线程?我们知道单线程下我们的任务是串行执行的,对于多CPU系统中,无法发挥多核心的优势,使用多线程将一个任务拆分为并行的多个任务,在多CPU系统并行执行任务,从而提高任务的执行效率。那么问题就来了,Hashtabe通过对象维度加锁,当存在多个线程并行操作时,就会存在锁竞争,这也是为什么常说Hashtable慢的原因所在。synchronized关键字加锁是对整个对象进行加锁,也就是说在进行put等修改Hash表的操作时,锁住了整个Hash表,从而使得其表现的效率低下。
Hashtable虽然保证了线程安全,但是在多线程下的执行效率存在问题,那么有没有更好的Map容器呢?答案是肯定的,java.util.concurrent(juc)包下的ConcurrentHashMap就为我们提供了高效且线程安全的Map容器解决方案。
ConcurrentHashMap
ConcurrentHashMap - JDK 1.7
在JDK1.5~1.7版本,Java使用了分段锁机制实现ConcurrentHashMap.
简而言之,ConcurrentHashMap在对象中保存了一个Segment数组,即将整个Hash表划分为多个分段;而每个Segment元素,即每个分段则类似于一个Hashtable;这样,在执行put操作时首先根据hash算法定位到元素属于哪个Segment,然后对该Segment加锁即可。因此,ConcurrentHashMap在多线程并发编程中可是实现多线程put操作。接下来分析JDK1.7版本中ConcurrentHashMap的实现原理。
数据结构
整个 ConcurrentHashMap 由一个个 Segment 组成,Segment 代表”部分“或”一段“的意思,所以很多地方都会将其描述为分段锁。注意,行文中,我很多地方用了“槽”来代表一个 segment。
简单理解就是,ConcurrentHashMap 是一个 Segment 数组,Segment 通过继承 ReentrantLock 来进行加锁,所以每次需要加锁的操作锁住的是一个 segment,这样只要保证每个 Segment 是线程安全的,也就实现了全局的线程安全。
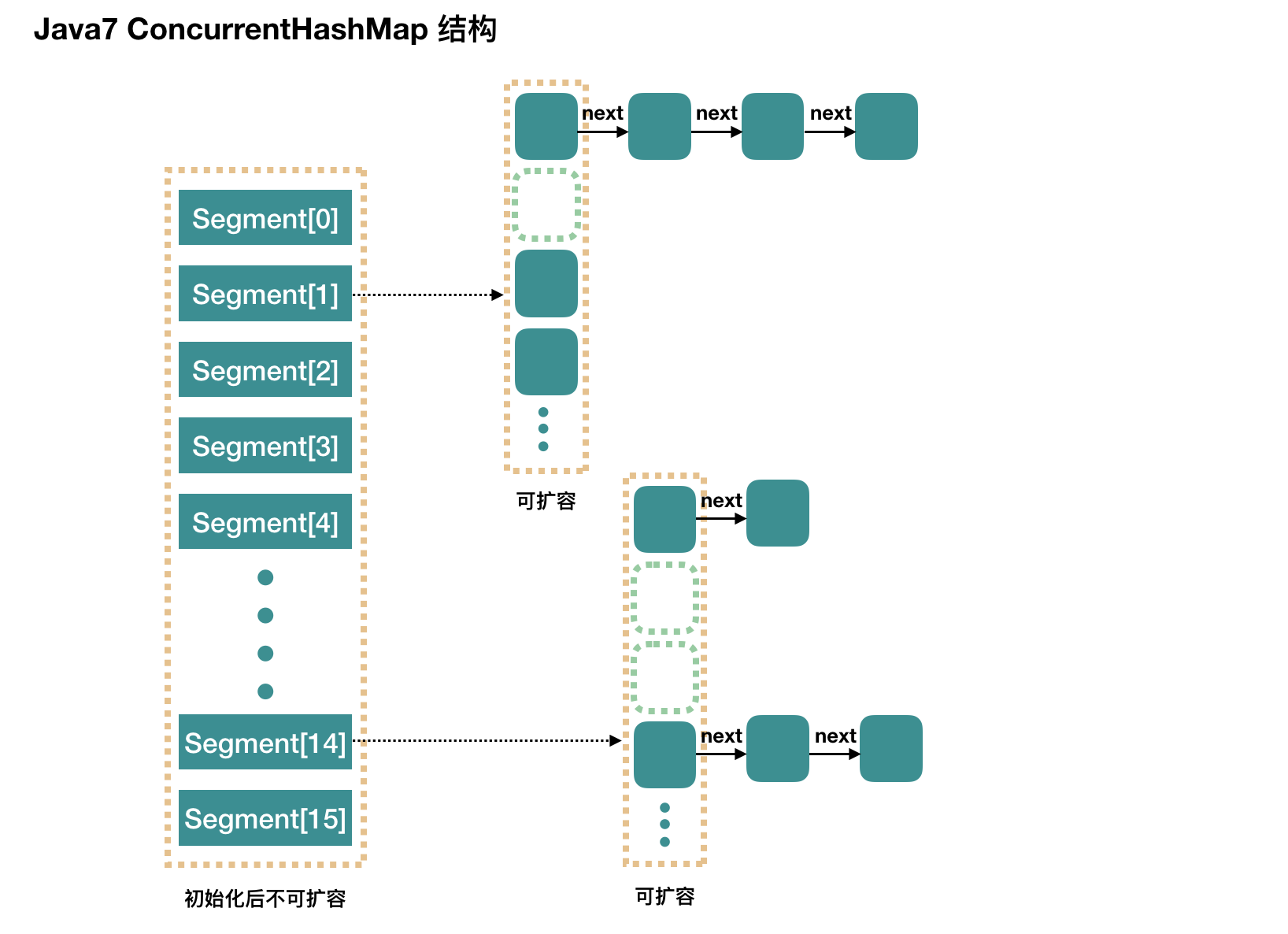

concurrencyLevel: 并行级别、并发数、Segment 数,怎么翻译不重要,理解它。默认是 16,也就是说 ConcurrentHashMap 有 16 个 Segments,所以理论上,这个时候,最多可以同时支持 16 个线程并发写,只要它们的操作分别分布在不同的 Segment 上。这个值可以在初始化的时候设置为其他值,但是一旦初始化以后,它是不可以扩容的。
再具体到每个 Segment 内部,其实每个 Segment 很像之前介绍的 HashMap,不过它要保证线程安全,所以处理起来要麻烦些。
初始化
-
initialCapacity: 初始容量,这个值指的是整个 ConcurrentHashMap 的初始容量,实际操作的时候需要平均分给每个 Segment。
-
loadFactor: 负载因子,之前我们说了,Segment 数组不可以扩容,所以这个负载因子是给每个 Segment 内部使用的。
public ConcurrentHashMap(int initialCapacity, float loadFactor, int concurrencyLevel) { if (!(loadFactor > 0) || initialCapacity < 0 || concurrencyLevel <= 0) throw new IllegalArgumentException();
// MAX_SEGMENTS = 1 << 16 if (concurrencyLevel > MAX_SEGMENTS) concurrencyLevel = MAX_SEGMENTS; int sshift = 0; int ssize = 1; // 计算并行级别 ssize,因为要保持并行级别是 2 的 n 次方 while (ssize < concurrencyLevel) { ++sshift; ssize <<= 1; } // 我们这里先不要那么烧脑,用默认值,concurrencyLevel 为 16,sshift 为 4 // 那么计算出 segmentShift 为 28,segmentMask 为 15,后面会用到这两个值 this.segmentShift = 32 - sshift; this.segmentMask = ssize - 1;
// MAXIMUM_CAPACITY = 1 << 30 if (initialCapacity > MAXIMUM_CAPACITY) initialCapacity = MAXIMUM_CAPACITY; // initialCapacity 是设置整个 map 初始的大小, // 这里根据 initialCapacity 计算 Segment 数组中每个位置可以分到的大小 // 如 initialCapacity 为 64,那么每个 Segment 或称之为"槽"可以分到 4 个 int c = initialCapacity / ssize; if (c * ssize < initialCapacity) ++c; // 默认 MIN_SEGMENT_TABLE_CAPACITY 是 2,这个值也是有讲究的,因为这样的话,对于具体的槽上, // 插入一个元素不至于扩容,插入第二个的时候才会扩容 int cap = MIN_SEGMENT_TABLE_CAPACITY; while (cap < c) cap <<= 1; // 创建 Segment 数组, // 并创建数组的第一个元素 segment[0] Segment<K,V> s0 = new Segment<K,V>(loadFactor, (int)(cap * loadFactor), (HashEntry<K,V>[])new HashEntry[cap]); Segment<K,V>[] ss = (Segment<K,V>[])new Segment[ssize]; // 往数组写入 segment[0] UNSAFE.putOrderedObject(ss, SBASE, s0); // ordered write of segments[0] this.segments = ss; }
初始化完成,我们得到了一个 Segment 数组。
我们就当是用 new ConcurrentHashMap() 无参构造函数进行初始化的,那么初始化完成后:
- Segment 数组长度为 16,不可以扩容
- Segment[i] 的默认大小为 2,负载因子是 0.75,得出初始阈值为 1.5,也就是以后插入第一个元素不会触发扩容,插入第二个会进行第一次扩容
- 这里初始化了 segment[0],其他位置还是 null,至于为什么要初始化 segment[0],后面的代码会介绍
- 当前 segmentShift 的值为 32 - 4 = 28,segmentMask 为 16 - 1 = 15,姑且把它们简单翻译为移位数和掩码,这两个值马上就会用到
put 过程分析
我们先看 put 的主流程,对于其中的一些关键细节操作,后面会进行详细介绍。
public V put(K key, V value) { Segment<K,V> s; if (value == null) throw new NullPointerException(); // 1. 计算 key 的 hash 值 int hash = hash(key); // 2. 根据 hash 值找到 Segment 数组中的位置 j // hash 是 32 位,无符号右移 segmentShift(28) 位,剩下高 4 位, // 然后和 segmentMask(15) 做一次与操作,也就是说 j 是 hash 值的高 4 位,也就是槽的数组下标 int j = (hash >>> segmentShift) & segmentMask; // 刚刚说了,初始化的时候初始化了 segment[0],但是其他位置还是 null, // ensureSegment(j) 对 segment[j] 进行初始化 if ((s = (Segment<K,V>)UNSAFE.getObject // nonvolatile; recheck (segments, (j << SSHIFT) + SBASE)) == null) // in ensureSegment s = ensureSegment(j); // 3. 插入新值到 槽 s 中 return s.put(key, hash, value, false); } private int hash(Object k) { int h = hashSeed; if ((0 != h) && (k instanceof String)) { return sun.misc.Hashing.stringHash32((String) k); } h ^= k.hashCode(); // Spread bits to regularize both segment and index locations, // using variant of single-word Wang/Jenkins hash. h += (h << 15) ^ 0xffffcd7d; h ^= (h >>> 10); h += (h << 3); h ^= (h >>> 6); h += (h << 2) + (h << 14); return h ^ (h >>> 16); }
第一层很简单,根据 hash 值很快就能找到相应的 Segment,之后就是 Segment 内部的 put 操作了。
Segment 内部是由 数组+链表 组成的。
final V put(K key, int hash, V value, boolean onlyIfAbsent) { // 在往该 segment 写入前,需要先获取该 segment 的独占锁 // 先看主流程,后面还会具体介绍这部分内容 HashEntry<K,V> node = tryLock() ? null : scanAndLockForPut(key, hash, value); V oldValue; try { // 这个是 segment 内部的数组 HashEntry<K,V>[] tab = table; // 再利用 hash 值,求应该放置的数组下标 int index = (tab.length - 1) & hash; // first 是数组该位置处的链表的表头 HashEntry<K,V> first = entryAt(tab, index); // 下面这串 for 循环虽然很长,不过也很好理解,想想该位置没有任何元素和已经存在一个链表这两种情况 for (HashEntry<K,V> e = first;;) { if (e != null) { K k; if ((k = e.key) == key || (e.hash == hash && key.equals(k))) { oldValue = e.value; if (!onlyIfAbsent) { // 覆盖旧值 e.value = value; ++modCount; } break; } // 继续顺着链表走 e = e.next; } else { // node 到底是不是 null,这个要看获取锁的过程,不过和这里都没有关系。 // 如果不为 null,那就直接将它设置为链表表头;如果是null,初始化并设置为链表表头。 if (node != null) node.setNext(first); else node = new HashEntry<K,V>(hash, key, value, first); int c = count + 1; // 如果超过了该 segment 的阈值,这个 segment 需要扩容 if (c > threshold && tab.length < MAXIMUM_CAPACITY) rehash(node); // 扩容后面也会具体分析 else // 没有达到阈值,将 node 放到数组 tab 的 index 位置, // 其实就是将新的节点设置成原链表的表头 setEntryAt(tab, index, node); ++modCount; count = c; oldValue = null; break; } } } finally { // 解锁 unlock(); } return oldValue; } /** * 仅当该锁没有被其他线程持有时才获取该锁的调用 */ public boolean ReentrantLock.tryLock() { return sync.nonfairTryAcquire(1); }
整体流程还是比较简单的,由于有独占锁的保护,所以 segment 内部的操作并不复杂。至于这里面的并发问题,我们稍后再进行介绍。
到这里 put 操作就结束了,接下来,我们说一说其中几步关键的操作。
初始化槽: ensureSegment
ConcurrentHashMap 初始化的时候会初始化第一个槽 segment[0],对于其他槽来说,在插入第一个值的时候进行初始化。
这里需要考虑并发,因为很可能会有多个线程同时进来初始化同一个槽 segment[k],不过只要有一个成功了就可以。
private Segment<K,V> ensureSegment(int k) { final Segment<K,V>[] ss = this.segments; long u = (k << SSHIFT) + SBASE;
Segment<K,V> seg; if ((seg = (Segment<K,V>)UNSAFE.getObjectVolatile(ss, u)) == null) { // 这里看到为什么之前要初始化 segment[0] 了, // 使用当前 segment[0] 处的数组长度和负载因子来初始化 segment[k] // 为什么要用“当前”,因为 segment[0] 可能早就扩容过了 Segment<K,V> proto = ss[0]; int cap = proto.table.length; float lf = proto.loadFactor; int threshold = (int)(cap * lf); // 初始化 segment[k] 内部的数组 HashEntry<K,V>[] tab = (HashEntry<K,V>[])new HashEntry[cap]; if ((seg = (Segment<K,V>)UNSAFE.getObjectVolatile(ss, u)) == null) { // 再次检查一遍该槽是否被其他线程初始化了。 Segment<K,V> s = new Segment<K,V>(lf, threshold, tab); // 使用 while 循环,内部用 CAS,当前线程成功设值或其他线程成功设值后,退出 while ((seg = (Segment<K,V>)UNSAFE.getObjectVolatile(ss, u)) == null) { if (UNSAFE.compareAndSwapObject(ss, u, null, seg = s)) break; } } } return seg; }
总的来说,ensureSegment(int k) 比较简单,对于并发操作使用 CAS 进行控制。
获取写入锁: scanAndLockForPut
前面我们看到,在往某个 segment 中 put 的时候,首先会调用 node = tryLock() ? null : scanAndLockForPut(key, hash, value),也就是说先进行一次 tryLock() 快速获取该 segment 的独占锁,如果失败,那么进入到 scanAndLockForPut 这个方法来获取锁。
下面我们来具体分析这个方法中是怎么控制加锁的。
private HashEntry<K,V> scanAndLockForPut(K key, int hash, V value) { HashEntry<K,V> first = entryForHash(this, hash); HashEntry<K,V> e = first; HashEntry<K,V> node = null;
// 重试标记 int retries = -1; // 循环获取锁 while (!tryLock()) { HashEntry<K,V> f; // to recheck first below if (retries < 0) { if (e == null) { if (node == null) // speculatively create node // 进到这里说明数组该位置的链表是空的,没有任何元素 // 当然,进到这里的另一个原因是 tryLock() 失败,所以该槽存在并发,不一定是该位置 node = new HashEntry<K,V>(hash, key, value, null); retries = 0; } else if (key.equals(e.key)) retries = 0; else // 顺着链表往下走 e = e.next; } // 重试次数如果超过 MAX_SCAN_RETRIES(单核1多核64),那么不抢了,进入到阻塞队列等待锁 // lock() 是阻塞方法,直到获取锁后返回 else if (++retries > MAX_SCAN_RETRIES) { lock(); break; } else if ((retries & 1) == 0 && // 这个时候是有大问题了,那就是有新的元素进到了链表,成为了新的表头 // 所以这边的策略是,相当于重新走一遍这个 scanAndLockForPut 方法 (f = entryForHash(this, hash)) != first) { e = first = f; // re-traverse if entry changed retries = -1; } } return node; }
这个方法有两个出口,一个是 tryLock() 成功了,循环终止,另一个就是重试次数超过了 MAX_SCAN_RETRIES,进到 lock() 方法,此方法会阻塞等待,直到成功拿到独占锁。
这个方法就是看似复杂,但是其实就是做了一件事,那就是获取该 segment 的独占锁,如果需要的话顺便实例化了一下 node。
扩容: rehash
重复一下,segment 数组不能扩容,扩容是 segment 数组某个位置内部的数组 HashEntry<K,V>[] 进行扩容,扩容后,容量为原来的 2 倍。
首先,我们要回顾一下触发扩容的地方,put 的时候,如果判断该值的插入会导致该 segment 的元素个数超过阈值,那么先进行扩容,再插值,读者这个时候可以回去 put 方法看一眼。
该方法不需要考虑并发,因为到这里的时候,是持有该 segment 的独占锁的。
// 方法参数上的 node 是这次扩容后,需要添加到新的数组中的数据。 private void rehash(HashEntry<K,V> node) { HashEntry<K,V>[] oldTable = table; int oldCapacity = oldTable.length; // 新数组长度 oldCapacity 的 2 倍 int newCapacity = oldCapacity << 1; threshold = (int)(newCapacity * loadFactor);
// 创建新数组 HashEntry<K,V>[] newTable = (HashEntry<K,V>[]) new HashEntry[newCapacity]; // 新的掩码,如从 16 扩容到 32,那么 sizeMask 为 31,对应二进制 ‘000...00011111’ int sizeMask = newCapacity - 1; // 遍历原数组,老套路,将原数组位置 i 处的链表拆分到 新数组位置 i 和 i+oldCap 两个位置 for (int i = 0; i < oldCapacity ; i++) { // e 是链表的第一个元素 HashEntry<K,V> e = oldTable[i]; if (e != null) { HashEntry<K,V> next = e.next; // 计算应该放置在新数组中的位置, // 假设原数组长度为 16,e 在 oldTable[3] 处,那么 idx 只可能是 3 或者是 3 + 16 = 19 int idx = e.hash & sizeMask; if (next == null) // 该位置处只有一个元素,那比较好办 newTable[idx] = e; else { // Reuse consecutive sequence at same slot // e 是链表表头 HashEntry<K,V> lastRun = e; // idx 是当前链表的头结点 e 的新位置 int lastIdx = idx; // 下面这个 for 循环会找到一个 lastRun 节点,这个节点之后的所有元素是将要放到一起的 for (HashEntry<K,V> last = next; last != null; last = last.next) { int k = last.hash & sizeMask; if (k != lastIdx) { lastIdx = k; lastRun = last; } }
// 将 lastRun 及其之后的所有节点组成的这个链表放到 lastIdx 这个位置 newTable[lastIdx] = lastRun; // 下面的操作是处理 lastRun 之前的节点, // 这些节点可能分配在另一个链表中,也可能分配到上面的那个链表中 for (HashEntry<K,V> p = e; p != lastRun; p = p.next) { V v = p.value; int h = p.hash; int k = h & sizeMask; HashEntry<K,V> n = newTable[k]; newTable[k] = new HashEntry<K,V>(h, p.key, v, n); } } } } // 将新来的 node 放到新数组中刚刚的 两个链表之一 的 头部 int nodeIndex = node.hash & sizeMask; // add the new node node.setNext(newTable[nodeIndex]); newTable[nodeIndex] = node; table = newTable; }
这里的扩容比之前的 HashMap 要复杂一些,代码难懂一点。上面有两个挨着的 for 循环,第一个 for 有什么用呢?
仔细一看发现,如果没有第一个 for 循环,也是可以工作的,但是,这个 for 循环下来,如果 lastRun 的后面还有比较多的节点,那么这次就是值得的。因为我们只需要克隆 lastRun 前面的节点,后面的一串节点跟着 lastRun 走就是了,不需要做任何操作。
我觉得 Doug Lea 的这个想法也是挺有意思的,不过比较坏的情况就是每次 lastRun 都是链表的最后一个元素或者很靠后的元素,那么这次遍历就有点浪费了。不过 Doug Lea 也说了,根据统计,如果使用默认的阈值,大约只有 1/6 的节点需要克隆。
get 过程分析
相对于 put 来说,get 真的不要太简单。
- 计算 hash 值,找到 segment 数组中的具体位置,或我们前面用的“槽”
- 槽中也是一个数组,根据 hash 找到数组中具体的位置
- 到这里是链表了,顺着链表进行查找即可
public V get(Object key) { Segment<K,V> s; // manually integrate access methods to reduce overhead HashEntry<K,V>[] tab; // 1. hash 值 int h = hash(key); long u = (((h >>> segmentShift) & segmentMask) << SSHIFT) + SBASE;
// 2. 根据 hash 找到对应的 segment if ((s = (Segment<K,V>)UNSAFE.getObjectVolatile(segments, u)) != null && (tab = s.table) != null) {
// 3. 找到segment 内部数组相应位置的链表,遍历 for (HashEntry<K,V> e = (HashEntry<K,V>) UNSAFE.getObjectVolatile (tab, ((long)(((tab.length - 1) & h)) << TSHIFT) + TBASE); e != null; e = e.next) { K k; if ((k = e.key) == key || (e.hash == h && key.equals(k))) return e.value; } } return null; }
经过上面的分析我们已经知道了ConcurrentHashMap采用的是分段锁机制来保证线程安全,使用 CAS 进行并发操作控制。对于CAS操作这里简单介绍一下
什么是CAS
CAS的全称为Compare-And-Swap,直译就是对比交换。是一条CPU的原子指令,其作用是让CPU先进行比较两个值是否相等,然后原子地更新某个位置的值,经过调查发现,其实现方式是基于硬件平台的汇编指令,就是说CAS是靠硬件实现的,JVM只是封装了汇编调用,那些AtomicInteger类便是使用了这些封装后的接口。简单解释:CAS操作需要输入两个数值,一个旧值(期望操作前的值)和一个新值,在操作期间先比较下在旧值有没有发生变化,如果没有发生变化,才交换成新值,发生了变化则不交换。
CAS操作是原子性的,所以多线程并发使用CAS更新数据时,可以不使用锁。JDK中大量使用了CAS来更新数据而防止加锁(synchronized 重量级锁)来保持原子更新。
CAS操作
/** * 比较obj的offset处内存位置中的值和期望的值,如果相同则更新。此更新是不可中断的。 * * @param obj 需要更新的对象 * @param offset obj中整型field的偏移量 * @param expect 希望field中存在的值 * @param update 如果期望值expect与field的当前值相同,设置filed的值为这个新值 * @return 如果field的值被更改返回true */ public native boolean compareAndSwapInt(Object obj, long offset, int expect, int update);
CAS操作有3个操作数,内存值M,预期值E,新值U,如果M==E,则将内存值修改为B,否则啥都不做。
public class AtomicReference<V> implements java.io.Serializable { private static final Unsafe unsafe = Unsafe.getUnsafe(); private static final long valueOffset; static { try { /** * JVM的实现可以自由选择如何实现Java对象的“布局”,也就是在内存里Java对象的各个部分放在哪里,
* 包括对象的实例字段和一些元数据之类。sun.misc.Unsafe里关于对象字段访问的方法把对象布局抽象出来,
* 它提供了objectFieldOffset()方法用于获取某个字段相对Java对象的“起始地址”的偏移量 */ valueOffset = unsafe.objectFieldOffset (AtomicReference.class.getDeclaredField("value")); } catch (Exception ex) { throw new Error(ex); } } private volatile V value; /** * Gets the current value. * * @return the current value */ public final V get() { return value; } /** * Sets to the given value. * * @param newValue the new value */ public final void set(V newValue) { value = newValue; } /** * Eventually sets to the given value. * * @param newValue the new value * @since 1.6 */ public final void lazySet(V newValue) { unsafe.putOrderedObject(this, valueOffset, newValue); } } public static void putOrderedObject() { AtomicReference atomicReference = new AtomicReference(); atomicReference.set(1); System.out.println("set=" + atomicReference.get()); atomicReference.lazySet(2); System.out.println("lazySet=" + atomicReference.get()); }
ConcurrentHashMap - JDK 1.8
在JDK1.7之前,ConcurrentHashMap是通过分段锁机制来实现的,所以其最大并发度受Segment的个数限制。因此,在JDK1.8中,ConcurrentHashMap的实现原理摒弃了这种设计,而是选择了与HashMap类似的数组+链表+红黑树的方式实现,而加锁则采用CAS和synchronized实现。
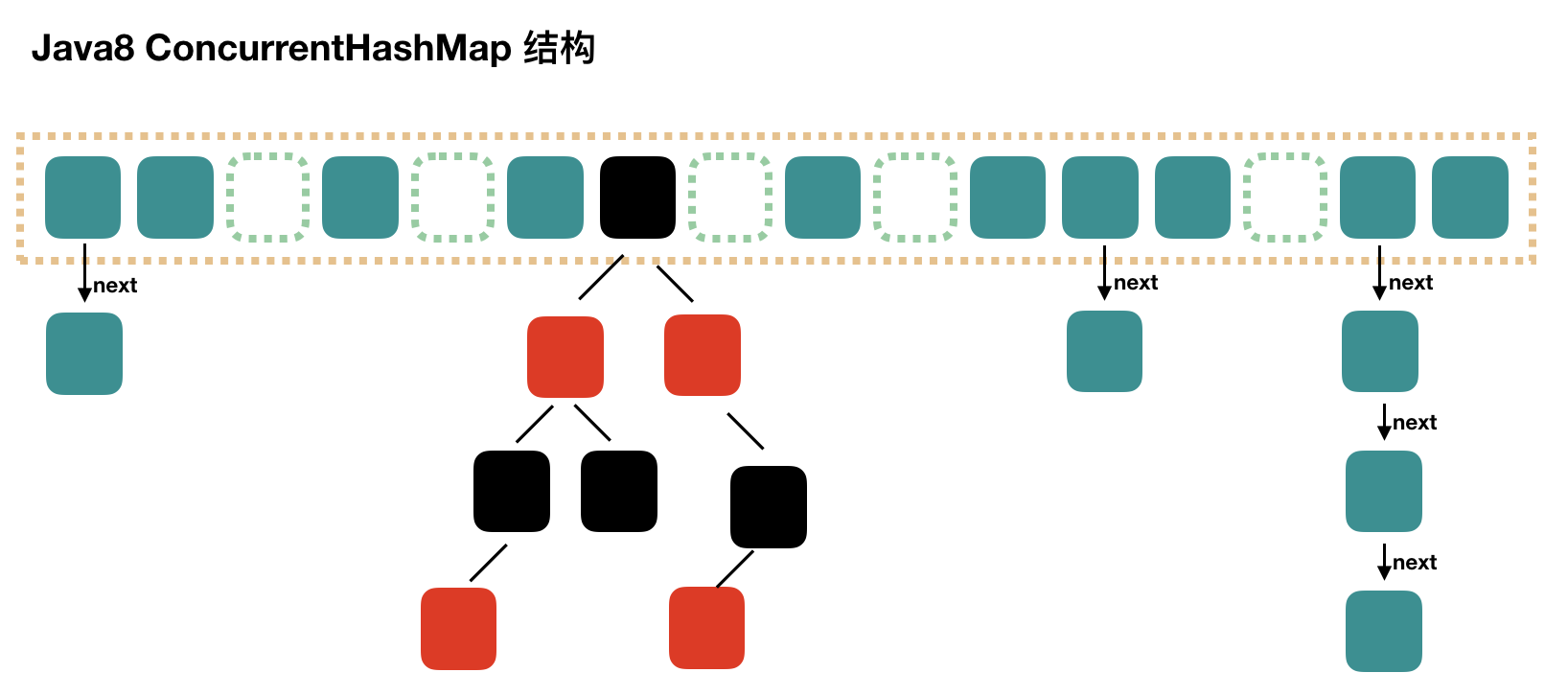
结构上和 Java8 的 HashMap 基本上一样,不过它要保证线程安全性,所以在源码上确实要复杂一些。
初始化
// 这构造函数里,什么都不干 public ConcurrentHashMap() { } public ConcurrentHashMap(int initialCapacity) { if (initialCapacity < 0) throw new IllegalArgumentException();
int cap = ((initialCapacity >= (MAXIMUM_CAPACITY >>> 1)) ? MAXIMUM_CAPACITY : tableSizeFor(initialCapacity + (initialCapacity >>> 1) + 1)); this.sizeCtl = cap; }
这个初始化方法有点意思,通过提供初始容量,计算了 sizeCtl,sizeCtl = 【 (1.5 * initialCapacity + 1),然后向上取最近的 2 的 n 次方】。如 initialCapacity 为 10,那么得到 sizeCtl 为 16,如果 initialCapacity 为 11,得到 sizeCtl 为 32。
sizeCtl 这个属性使用的场景很多,不过只要跟着文章的思路来,就不会被它搞晕了。
put 过程分析
public V put(K key, V value) { return putVal(key, value, false); } final V putVal(K key, V value, boolean onlyIfAbsent) { if (key == null || value == null) throw new NullPointerException();
// 得到 hash 值 int hash = spread(key.hashCode());
// 用于记录相应链表的长度 int binCount = 0; for (Node<K,V>[] tab = table;;) { Node<K,V> f; int n, i, fh; // 如果数组"空",进行数组初始化 if (tab == null || (n = tab.length) == 0) // 初始化数组,后面会详细介绍 tab = initTable(); // 找该 hash 值对应的数组下标,得到第一个节点 f else if ((f = tabAt(tab, i = (n - 1) & hash)) == null) { // 如果数组该位置为空, // 用一次 CAS 操作将这个新值放入其中即可,这个 put 操作差不多就结束了,可以拉到最后面了 // 如果 CAS 失败,那就是有并发操作,进到下一个循环就好了 if (casTabAt(tab, i, null, new Node<K,V>(hash, key, value, null))) break; // no lock when adding to empty bin } // hash 居然可以等于 MOVED,这个需要到后面才能看明白,不过从名字上也能猜到,肯定是因为在扩容 else if ((fh = f.hash) == MOVED) // 帮助数据迁移,这个等到看完数据迁移部分的介绍后,再理解这个就很简单了 tab = helpTransfer(tab, f); else {
// 到这里就是说,f 是该位置的头结点,而且不为空 V oldVal = null; // 获取数组该位置的头结点的监视器锁 synchronized (f) { if (tabAt(tab, i) == f) { if (fh >= 0) { // 头结点的 hash 值大于 0,说明是链表 // 用于累加,记录链表的长度 binCount = 1; // 遍历链表 for (Node<K,V> e = f;; ++binCount) { K ek; // 如果发现了"相等"的 key,判断是否要进行值覆盖,然后也就可以 break 了 if (e.hash == hash && ((ek = e.key) == key || (ek != null && key.equals(ek)))) { oldVal = e.val; if (!onlyIfAbsent) e.val = value; break; }
// 到了链表的最末端,将这个新值放到链表的最后面 Node<K,V> pred = e; if ((e = e.next) == null) { pred.next = new Node<K,V>(hash, key, value, null); break; } } } else if (f instanceof TreeBin) { // 红黑树 Node<K,V> p; binCount = 2; // 调用红黑树的插值方法插入新节点 if ((p = ((TreeBin<K,V>)f).putTreeVal(hash, key, value)) != null) { oldVal = p.val; if (!onlyIfAbsent) p.val = value; } } } } if (binCount != 0) { // 判断是否要将链表转换为红黑树,临界值和 HashMap 一样,也是 8 if (binCount >= TREEIFY_THRESHOLD) // 这个方法和 HashMap 中稍微有一点点不同,那就是它不是一定会进行红黑树转换, // 如果当前数组的长度小于 64,那么会选择进行数组扩容,而不是转换为红黑树 treeifyBin(tab, i); if (oldVal != null) return oldVal; break; } } }
// 待补充 addCount(1L, binCount); return null; }
初始化数组: initTable
这个比较简单,主要就是初始化一个合适大小的数组,然后会设置 sizeCtl。
初始化方法中的并发问题是通过对 sizeCtl 进行一个 CAS 操作来控制的。
private final Node<K,V>[] initTable() { Node<K,V>[] tab; int sc; while ((tab = table) == null || tab.length == 0) { // 初始化的"功劳"被其他线程"抢去"了 if ((sc = sizeCtl) < 0) Thread.yield(); // lost initialization race; just spin // CAS 一下,将 sizeCtl 设置为 -1,代表抢到了锁 else if (U.compareAndSwapInt(this, SIZECTL, sc, -1)) { try { if ((tab = table) == null || tab.length == 0) { // DEFAULT_CAPACITY 默认初始容量是 16 int n = (sc > 0) ? sc : DEFAULT_CAPACITY; // 初始化数组,长度为 16 或初始化时提供的长度 Node<K,V>[] nt = (Node<K,V>[])new Node<?,?>[n]; // 将这个数组赋值给 table,table 是 volatile 的 table = tab = nt; // 如果 n 为 16 的话,那么这里 sc = 12 // 其实就是 0.75 * n sc = n - (n >>> 2); } } finally { // 设置 sizeCtl 为 sc,我们就当是 12 吧 sizeCtl = sc; } break; } } return tab; }
链表转红黑树: treeifyBin
前面我们在 put 源码分析也说过,treeifyBin 不一定就会进行红黑树转换,也可能是仅仅做数组扩容。
private final void treeifyBin(Node<K,V>[] tab, int index) { Node<K,V> b; int n, sc; if (tab != null) { // MIN_TREEIFY_CAPACITY 为 64 // 所以,如果数组长度小于 64 的时候,其实也就是 32 或者 16 或者更小的时候,会进行数组扩容 if ((n = tab.length) < MIN_TREEIFY_CAPACITY) // 尝试进行数组预扩容 tryPresize(n << 1); // b 是头结点 else if ((b = tabAt(tab, index)) != null && b.hash >= 0) { // 加锁 synchronized (b) { if (tabAt(tab, index) == b) { // 下面就是遍历链表,建立一颗红黑树 TreeNode<K,V> hd = null, tl = null; for (Node<K,V> e = b; e != null; e = e.next) { TreeNode<K,V> p = new TreeNode<K,V>(e.hash, e.key, e.val, null, null); if ((p.prev = tl) == null) hd = p; else tl.next = p; tl = p; } // 将红黑树设置到数组相应位置中 setTabAt(tab, index, new TreeBin<K,V>(hd)); } } } } }
预扩容: tryPresize
如果说 Java8 ConcurrentHashMap 的源码不简单,那么说的就是预扩容操作和迁移操作。
这个方法要完完全全看懂还需要看之后的 transfer 方法
这里的预扩容也是做翻倍扩容的,扩容后数组容量为原来的 2 倍。
// 首先要说明的是,方法参数 size 传进来的时候就已经翻了倍了 private final void tryPresize(int size) { // c: size 的 1.5 倍,再加 1,再往上取最近的 2 的 n 次方。 int c = (size >= (MAXIMUM_CAPACITY >>> 1)) ? MAXIMUM_CAPACITY : tableSizeFor(size + (size >>> 1) + 1);
int sc; while ((sc = sizeCtl) >= 0) { Node<K,V>[] tab = table; int n; // 这个 if 分支和之前说的初始化数组的代码基本上是一样的,在这里,我们可以不用管这块代码 if (tab == null || (n = tab.length) == 0) { n = (sc > c) ? sc : c; if (U.compareAndSwapInt(this, SIZECTL, sc, -1)) { try { if (table == tab) { @SuppressWarnings("unchecked") Node<K,V>[] nt = (Node<K,V>[])new Node<?,?>[n]; table = nt; sc = n - (n >>> 2); // 0.75 * n } } finally { sizeCtl = sc; } } }
else if (c <= sc || n >= MAXIMUM_CAPACITY) break;
else if (tab == table) { // 我没看懂 rs 的真正含义是什么,不过也关系不大 int rs = resizeStamp(n); if (sc < 0) { Node<K,V>[] nt; if ((sc >>> RESIZE_STAMP_SHIFT) != rs || sc == rs + 1 || sc == rs + MAX_RESIZERS || (nt = nextTable) == null || transferIndex <= 0) break;
// 2. 用 CAS 将 sizeCtl 加 1,然后执行 transfer 方法 // 此时 nextTab 不为 null if (U.compareAndSwapInt(this, SIZECTL, sc, sc + 1)) transfer(tab, nt); }
// 1. 将 sizeCtl 设置为 (rs << RESIZE_STAMP_SHIFT) + 2) // 我是没看懂这个值真正的意义是什么? 不过可以计算出来的是,结果是一个比较大的负数 // 调用 transfer 方法,此时 nextTab 参数为 null else if (U.compareAndSwapInt(this, SIZECTL, sc, (rs << RESIZE_STAMP_SHIFT) + 2)) transfer(tab, null); } } }
这个方法的核心在于 sizeCtl 值的操作,首先将其设置为一个负数,然后执行 transfer(tab, null),再下一个循环将 sizeCtl 加 1,并执行 transfer(tab, nt),之后可能是继续 sizeCtl 加 1,并执行 transfer(tab, nt)。
所以,可能的操作就是执行 1 次 transfer(tab, null) + 多次 transfer(tab, nt),这里怎么结束循环的需要看完 transfer 源码才清楚。
数据迁移: transfer
下面这个方法有点长,将原来的 tab 数组的元素迁移到新的 nextTab 数组中。
虽然我们之前说的 tryPresize 方法中多次调用 transfer 不涉及多线程,但是这个 transfer 方法可以在其他地方被调用,典型地,我们之前在说 put 方法的时候就说过了,请往上看 put 方法,是不是有个地方调用了 helpTransfer 方法,helpTransfer 方法会调用 transfer 方法的。
此方法支持多线程执行,外围调用此方法的时候,会保证第一个发起数据迁移的线程,nextTab 参数为 null,之后再调用此方法的时候,nextTab 不会为 null。
阅读源码之前,先要理解并发操作的机制。原数组长度为 n,所以我们有 n 个迁移任务,让每个线程每次负责一个小任务是最简单的,每做完一个任务再检测是否有其他没做完的任务,帮助迁移就可以了,而 Doug Lea 使用了一个 stride,简单理解就是步长,每个线程每次负责迁移其中的一部分,如每次迁移 16 个小任务。所以,我们就需要一个全局的调度者来安排哪个线程执行哪几个任务,这个就是属性 transferIndex 的作用。
第一个发起数据迁移的线程会将 transferIndex 指向原数组最后的位置,然后从后往前的 stride 个任务属于第一个线程,然后将 transferIndex 指向新的位置,再往前的 stride 个任务属于第二个线程,依此类推。当然,这里说的第二个线程不是真的一定指代了第二个线程,也可以是同一个线程,这个读者应该能理解吧。其实就是将一个大的迁移任务分为了一个个任务包。
private final void transfer(Node<K,V>[] tab, Node<K,V>[] nextTab) { int n = tab.length, stride; // stride 在单核下直接等于 n,多核模式下为 (n>>>3)/NCPU,最小值是 16 // stride 可以理解为”步长“,有 n 个位置是需要进行迁移的, // 将这 n 个任务分为多个任务包,每个任务包有 stride 个任务 if ((stride = (NCPU > 1) ? (n >>> 3) / NCPU : n) < MIN_TRANSFER_STRIDE) stride = MIN_TRANSFER_STRIDE; // 如果 nextTab 为 null,先进行一次初始化 // 前面我们说了,外围会保证第一个发起迁移的线程调用此方法时,参数 nextTab 为 null // 之后参与迁移的线程调用此方法时,nextTab 不会为 null if (nextTab == null) { try { // 容量翻倍 Node<K,V>[] nt = (Node<K,V>[])new Node<?,?>[n << 1]; nextTab = nt; } catch (Throwable ex) { // try to cope with OOME sizeCtl = Integer.MAX_VALUE; return; } // nextTable 是 ConcurrentHashMap 中的属性 nextTable = nextTab; // transferIndex 也是 ConcurrentHashMap 的属性,用于控制迁移的位置 transferIndex = n; } int nextn = nextTab.length; // ForwardingNode 翻译过来就是正在被迁移的 Node // 这个构造方法会生成一个Node,key、value 和 next 都为 null,关键是 hash 为 MOVED // 后面我们会看到,原数组中位置 i 处的节点完成迁移工作后, // 就会将位置 i 处设置为这个 ForwardingNode,用来告诉其他线程该位置已经处理过了 // 所以它其实相当于是一个标志。 ForwardingNode<K,V> fwd = new ForwardingNode<K,V>(nextTab); // advance 指的是做完了一个位置的迁移工作,可以准备做下一个位置的了 boolean advance = true; boolean finishing = false; // to ensure sweep before committing nextTab /* * 下面这个 for 循环,最难理解的在前面,而要看懂它们,应该先看懂后面的,然后再倒回来看 */ // i 是位置索引,bound 是边界,注意是从后往前 for (int i = 0, bound = 0;;) { Node<K,V> f; int fh; // 下面这个 while 真的是不好理解 // advance 为 true 表示可以进行下一个位置的迁移了 // 简单理解结局: i 指向了 transferIndex,bound 指向了 transferIndex-stride while (advance) { int nextIndex, nextBound;
// --i >= bound : 按一个步长进行数据迁移
// finishing : 结束数据迁移 if (--i >= bound || finishing) advance = false; // 将 transferIndex 值赋给 nextIndex // 这里 transferIndex 一旦小于等于 0,说明原数组的所有位置都有相应的线程去处理了 else if ((nextIndex = transferIndex) <= 0) { i = -1; advance = false; } else if (U.compareAndSwapInt (this, TRANSFERINDEX, nextIndex, nextBound = (nextIndex > stride ? nextIndex - stride : 0))) { // 看括号中的代码,nextBound 是这次迁移任务的边界,注意,是从后往前 bound = nextBound; i = nextIndex - 1; advance = false; } }
if (i < 0 || i >= n || i + n >= nextn) { int sc; if (finishing) { // 所有的迁移操作已经完成 nextTable = null; // 将新的 nextTab 赋值给 table 属性,完成迁移 table = nextTab; // 重新计算 sizeCtl: n 是原数组长度,所以 sizeCtl 得出的值将是新数组长度的 0.75 倍 sizeCtl = (n << 1) - (n >>> 1); return; } // 之前我们说过,sizeCtl 在迁移前会设置为 (rs << RESIZE_STAMP_SHIFT) + 2 // 然后,每有一个线程参与迁移就会将 sizeCtl 加 1, // 这里使用 CAS 操作对 sizeCtl 进行减 1,代表做完了属于自己的任务 if (U.compareAndSwapInt(this, SIZECTL, sc = sizeCtl, sc - 1)) { // 任务结束,方法退出 if ((sc - 2) != resizeStamp(n) << RESIZE_STAMP_SHIFT) return; // 到这里,说明 (sc - 2) == resizeStamp(n) << RESIZE_STAMP_SHIFT, // 也就是说,所有的迁移任务都做完了,也就会进入到上面的 if(finishing){} 分支了 finishing = advance = true; i = n; // recheck before commit } } // 如果位置 i 处是空的,没有任何节点,那么放入刚刚初始化的 ForwardingNode ”空节点“ else if ((f = tabAt(tab, i)) == null) advance = casTabAt(tab, i, null, fwd); // 该位置处是一个 ForwardingNode,代表该位置已经迁移过了 else if ((fh = f.hash) == MOVED) advance = true; // already processed else { // 对数组该位置处的结点加锁,开始处理数组该位置处的迁移工作 synchronized (f) { if (tabAt(tab, i) == f) { Node<K,V> ln, hn; // 头结点的 hash 大于 0,说明是链表的 Node 节点 if (fh >= 0) { // 下面这一块和 Java7 中的 ConcurrentHashMap 迁移是差不多的, // 需要将链表一分为二, // 找到原链表中的 lastRun,然后 lastRun 及其之后的节点是一起进行迁移的 // lastRun 之前的节点需要进行克隆,然后分到两个链表中 int runBit = fh & n; Node<K,V> lastRun = f; for (Node<K,V> p = f.next; p != null; p = p.next) { int b = p.hash & n; if (b != runBit) { runBit = b; lastRun = p; } } if (runBit == 0) { ln = lastRun; hn = null; } else { hn = lastRun; ln = null; } for (Node<K,V> p = f; p != lastRun; p = p.next) { int ph = p.hash; K pk = p.key; V pv = p.val; if ((ph & n) == 0) ln = new Node<K,V>(ph, pk, pv, ln); else hn = new Node<K,V>(ph, pk, pv, hn); } // 其中的一个链表放在新数组的位置 i setTabAt(nextTab, i, ln); // 另一个链表放在新数组的位置 i+n setTabAt(nextTab, i + n, hn); // 将原数组该位置处设置为 fwd,代表该位置已经处理完毕, // 其他线程一旦看到该位置的 hash 值为 MOVED,就不会进行迁移了 setTabAt(tab, i, fwd); // advance 设置为 true,代表该位置已经迁移完毕 advance = true; } else if (f instanceof TreeBin) { // 红黑树的迁移 TreeBin<K,V> t = (TreeBin<K,V>)f; TreeNode<K,V> lo = null, loTail = null; TreeNode<K,V> hi = null, hiTail = null; int lc = 0, hc = 0; for (Node<K,V> e = t.first; e != null; e = e.next) { int h = e.hash; TreeNode<K,V> p = new TreeNode<K,V> (h, e.key, e.val, null, null); if ((h & n) == 0) { if ((p.prev = loTail) == null) lo = p; else loTail.next = p; loTail = p; ++lc; } else { if ((p.prev = hiTail) == null) hi = p; else hiTail.next = p; hiTail = p; ++hc; } } // 如果一分为二后,节点数少于 8,那么将红黑树转换回链表 ln = (lc <= UNTREEIFY_THRESHOLD) ? untreeify(lo) : (hc != 0) ? new TreeBin<K,V>(lo) : t; hn = (hc <= UNTREEIFY_THRESHOLD) ? untreeify(hi) : (lc != 0) ? new TreeBin<K,V>(hi) : t; // 将 ln 放置在新数组的位置 i setTabAt(nextTab, i, ln); // 将 hn 放置在新数组的位置 i+n setTabAt(nextTab, i + n, hn); // 将原数组该位置处设置为 fwd,代表该位置已经处理完毕, // 其他线程一旦看到该位置的 hash 值为 MOVED,就不会进行迁移了 setTabAt(tab, i, fwd); // advance 设置为 true,代表该位置已经迁移完毕 advance = true; } } } } } }
说到底,transfer 这个方法并没有实现所有的迁移任务,每次调用这个方法只实现了 transferIndex 往前 stride 个位置的迁移工作,其他的需要由外围来控制。
这个时候,再回去仔细看 tryPresize 方法可能就会更加清晰一些了。
get 过程分析
get 方法从来都是最简单的,这里也不例外:
- 计算 hash 值
- 根据 hash 值找到数组对应位置: (n - 1) & h
- 根据该位置处结点性质进行相应查找
- 如果该位置为 null,那么直接返回 null 就可以了
- 如果该位置处的节点刚好就是我们需要的,返回该节点的值即可
- 如果该位置节点的 hash 值小于 0,说明正在扩容,或者是红黑树,后面我们再介绍 find 方法
- 如果以上 3 条都不满足,那就是链表,进行遍历比对即可
public V get(Object key) { Node<K,V>[] tab; Node<K,V> e, p; int n, eh; K ek; int h = spread(key.hashCode()); if ((tab = table) != null && (n = tab.length) > 0 && (e = tabAt(tab, (n - 1) & h)) != null) { // 判断头结点是否就是我们需要的节点 if ((eh = e.hash) == h) { if ((ek = e.key) == key || (ek != null && key.equals(ek))) return e.val; } // 如果头结点的 hash 小于 0,说明 正在扩容,或者该位置是红黑树 else if (eh < 0) // 参考 ForwardingNode.find(int h, Object k) 和 TreeBin.find(int h, Object k) return (p = e.find(h, key)) != null ? p.val : null; // 遍历链表 while ((e = e.next) != null) { if (e.hash == h && ((ek = e.key) == key || (ek != null && key.equals(ek)))) return e.val; } } return null; }
对比总结
HashTable: 使用了synchronized关键字对put等操作进行加锁;ConcurrentHashMap JDK1.7: 使用分段锁机制实现;ConcurrentHashMap JDK1.8: 则使用数组+链表+红黑树数据结构和CAS原子操作实现;
参考文章
- https://www.pdai.tech/md/java/thread/java-thread-x-juc-collection-ConcurrentHashMap.html
- https://www.pdai.tech/md/java/thread/java-thread-x-juc-AtomicInteger.html
- https://blog.csdn.net/blogs_broadcast/article/details/80672515