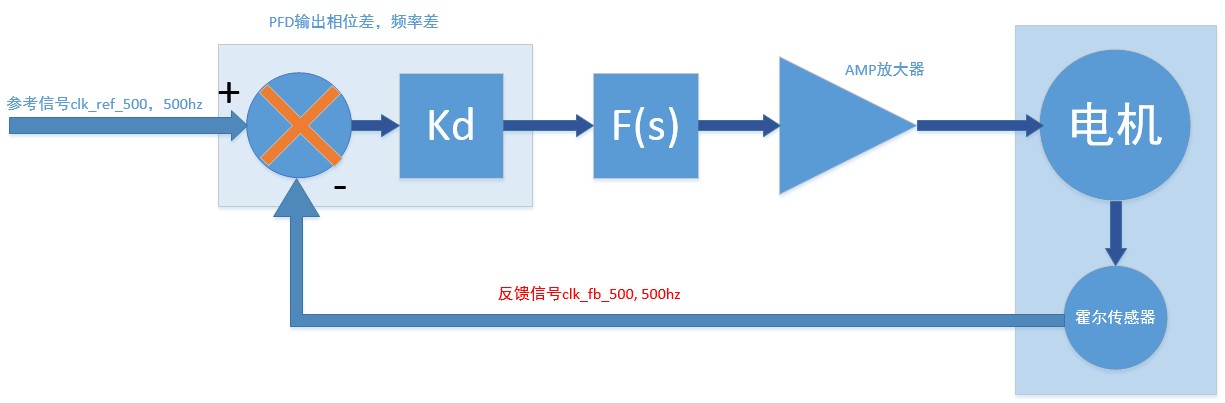
1. 对于电机的锁相控制,需要对相差进行PI性质的环路滤波,但现有的锁相环中鉴频鉴相器输出为相差脉冲而非数字量,难以直接进行PI特性的环路滤波。
通过对晶振的非整数分频获取准确的参考时钟,基于触发器机制实现了PFD相差脉冲的数字量化,且可以输出频差数字量。锁相环是频率和相位的同步控制系统,实现输入参考信号和反馈信号的频率相等,相位差恒定。利用锁相环技术可实现数字信号的同步,将这个思想引入电机的速度控制系统中,则能够实现稳态精度很高的转速控制。综合起来就是电机转速的控制反馈系统,因为要求相位差恒定,所以需要准确的检测相位差,而本次的设计就是检测相位差。锁相环和数字鉴相鉴频器是两个东西,前者是控制,后者是检测。
2. Pi性质的环路滤波?难道是PID控制,在反馈系统中,用输出的实际值和理论值的差值去反馈进系统的输入。PID就是反馈的比例,积分和微分。不过这里的滤波是什么?电机的锁相环控制中,电机加霍尔传感器是二阶系统。什么是二阶系统? y=ax^2+bx+c?
3. 做鉴相鉴频器的目的是为了稳速,不过现在还没明白,如何提高速度。这并不是我们关心的,假设电机转速500转每秒(霍尔传感器采样得到500MHz),晶振时钟是40MHz。
4.为了得到500 Hz的参考时钟,需要对40 MHz的晶振时钟进行两次分频操作。分频系数为N-0.5(N为整数)时,就是半整数分频。本次需要实现奇数分频,还有半整数分频。对40 MHz的晶振时钟先后进行等占空比125分频和2. 5半整数分频,得到320 kHz和128 kHz的时钟,经过时钟预分频器分频后的固定占空比128 kHz的时钟信号经过8位计数器,得到500 Hz的参考输入信号,反馈时钟输入并检测到其上升沿。
5. 在每个反馈信号的上升沿保存8位寄存器的值,这个值就是频率差(非线性)和相位差(线性)。同时用一个标志位,为1说明有上升沿,为0说明无上升沿,代码如下
module pfd(reset, clk_40mhz, clk_128k, clk_fb_500, phase_value, clk_ref_out);
input reset;
input clk_128k; //两次分频得到的128Khz的时钟
input clk_fb_500; //电机的反馈时钟500hz
input clk_40mhz;
reg clk_ref_500;
output [7:0] phase_value;
reg [7:0] phase_reg;
output clk_ref_out;
reg [7:0] cout_8bit; //8位计数器
reg [7:0] ph_reg; //8位寄存器
reg have_flag;
reg clk_fb_prv;
reg clk_ref_prv;
reg [7:0] phase_value_1;
reg [7:0] phase_value_tmp;
parameter PHASE_MAX_VALUE = 8'h7F;
wire cout_en;
//8位计数器,一个always里面可以写2个if语句吗?
always @(posedge clk_128k or negedge reset) begin
if(!reset)
cout_8bit <= 8'b0;
else
cout_8bit <= cout_8bit + 1'b1;
end
//产生参考时钟500HZ
always @(posedge clk_40mhz) begin
if(cout_8bit == 8'h0)
clk_ref_500 <= 0;
else if(cout_8bit == 8'h7f)
clk_ref_500 <= 1;
else
clk_ref_500 <= clk_ref_500;
end
//D触发器,边沿检测反馈信号上升沿和参考信号下降沿
/*
always @(posedge clk_fb_500 or negedge clk_ref_500) begin
if(clk_fb_500 == 1) begin
have_flag = 1;
clk_fb_prv = clk_fb_500;
phase_value_1 = cout_8bit; end
else if(clk_ref_500 == 0) begin
have_flag = 0;
phase_value = phase_value_tmp; end
else
have_flag = 0;
end
*/
always @(posedge clk_40mhz) begin
clk_fb_prv <= clk_fb_500;
clk_ref_prv <= clk_ref_500;
if({clk_fb_prv,clk_fb_500} == 2'b01) begin //判断反馈信号的上升沿
have_flag <= 1;
phase_value_1 <= cout_8bit; end
else if({clk_ref_prv,clk_ref_500} == 2'b01) begin //判断参考信号的上升沿
have_flag <= 0;
phase_reg <= phase_value_tmp; end
else
have_flag <= have_flag;
end
//怎么去解决一个周期内有2个反馈信号的上升沿的问题?
//总线选通开关
always @(posedge clk_40mhz)begin
if(have_flag == 1)
phase_value_tmp <= phase_value_1;
else
phase_value_tmp <= PHASE_MAX_VALUE;
end
//PFD输出
//always @(posedge clk_128k)
assign clk_ref_out = clk_ref_500;
assign phase_value = phase_reg;
endmodule
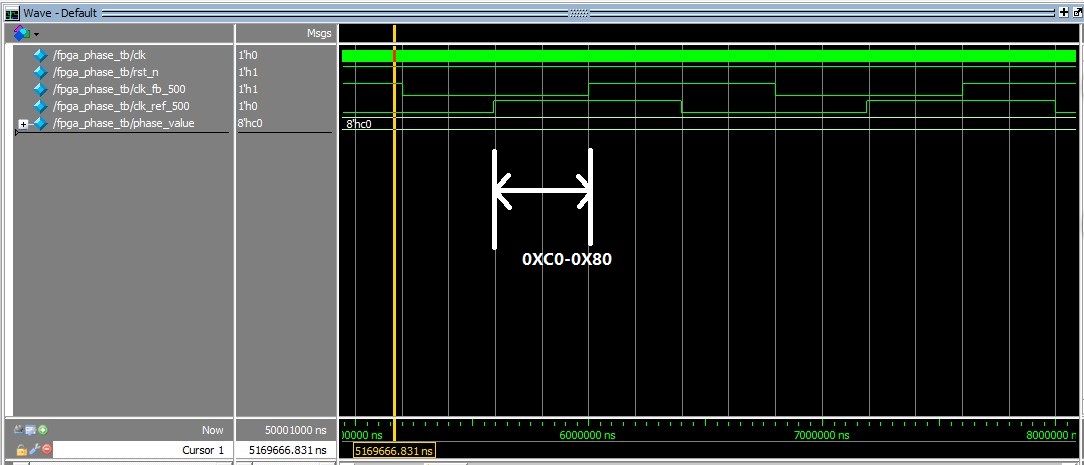
6. 实际仿真如下,当反馈信号滞后于参考信号1/4周期的时候,输出为0xc0,那么高位为1,说明是滞后(0xff-0xc0=0xff/4),不过波形都是相对的周期,换种说法说是超前0xc0也是对的,主要是看对比前一个参考上升沿还是下一个参考上升沿。两种定义都可以。
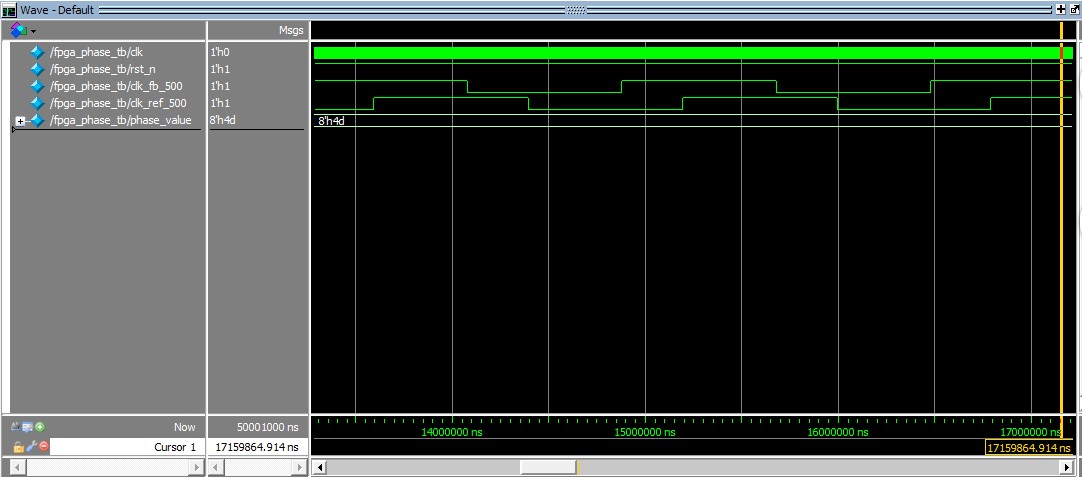
7. 当反馈信号超前于参考信号的时候,输出为0x4d,那么高位为0,说明是超前(0x4d)
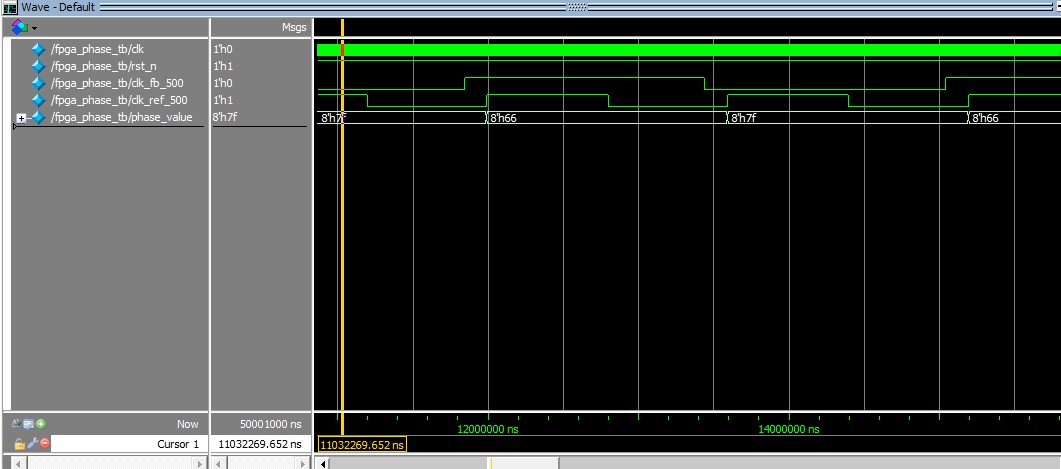
8. 频率差,当反馈信号的频率高于参考信号时,在一个参考时钟周期内会有多个反馈时钟的上升沿出现,PFD的输出将会是最后一个反馈时钟沿对应的寄存的值,是一个负数,表明反馈信号超前参考信号。锁相环路将会降低VCO的输出降低反馈信号的频率。当反馈信号的频率低于参考信号时,在某个参考时钟周期内将不会有反馈信号的上升沿出现,此时PFD会复位触发器,输出对应于最大滞后量的7FH,此时锁相环路将会提高VCO的输出提高反馈信号的频率。下图是输出0X7FH的仿真。当然在下一个周期,仍然会检测到反馈信号的上升沿,所以0X7FH和0X66H间隔出现,证明了本次仿真是正确的。