
model motor1 "An DC Motor Model"
type Voltage=Real(unit="V");
type Current=Real(unit="A");
type Resistance=Real(unit="Ohm");
type Speed=Real(unit="r/min");
type Torque=Real(unit="N.m");
type Inertia=Real(unit="kg.m^2");
Torque Tm"Torque of the Motor";
Speed n"Speed of the Motor";
Current i"Armature Current";
Voltage u"Voltage Source";
Resistance R_ad"External Resistance";
Resistance R1"Start-up Resistance";
Resistance R2"Start-up Resistance";
Resistance R3"Start-up Resistance";
parameter Real J = 1"Total Inertia";
parameter Real R = 0.6"Armature Resistance";
parameter Real Kt = 1.8"Torque Constant";
parameter Real Ke = 0.189"EMF Constant";
parameter Real i1=48.6"Maximum Current";
parameter Real i2=17.8"Minimum Current";
parameter Real Tl = 29.2"Load Torque";
equation
Tm-Tl = J * der(n) * 6.28 / 60;
Tm= Kt * i;
u= i * (R+R_ad+R1+R2+R3) + Ke * n;
if time <= 0.1 then
u = 0;
R_ad = 0;
else
u = 240;
R_ad = 0;
end if;
if time <= 5.0 then
R1=3.67;
else
R1=0;
end if;
if time <=7.4 then
R2=1.65;
else
R2=0;
end if;
if time <= 10 then
R3=0.74;
else
R3=0;
end if;
end motor1;
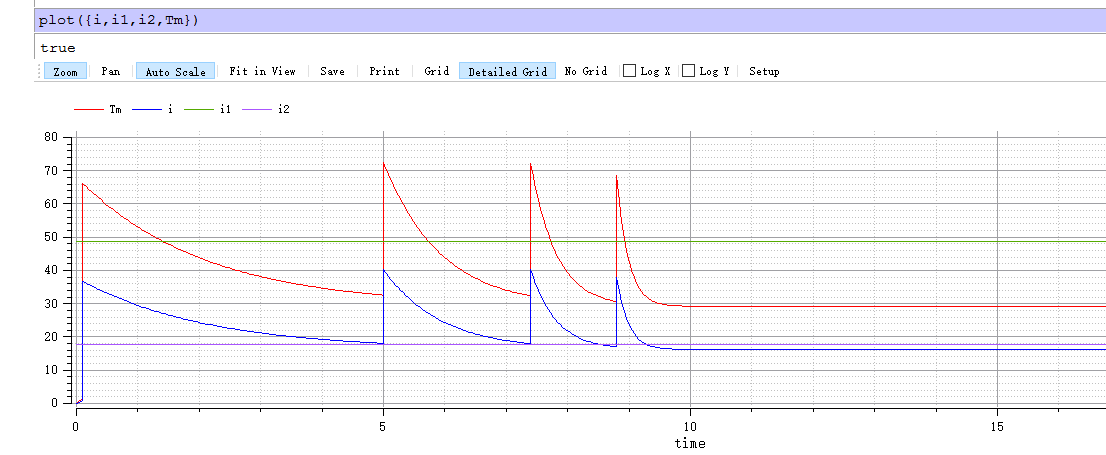
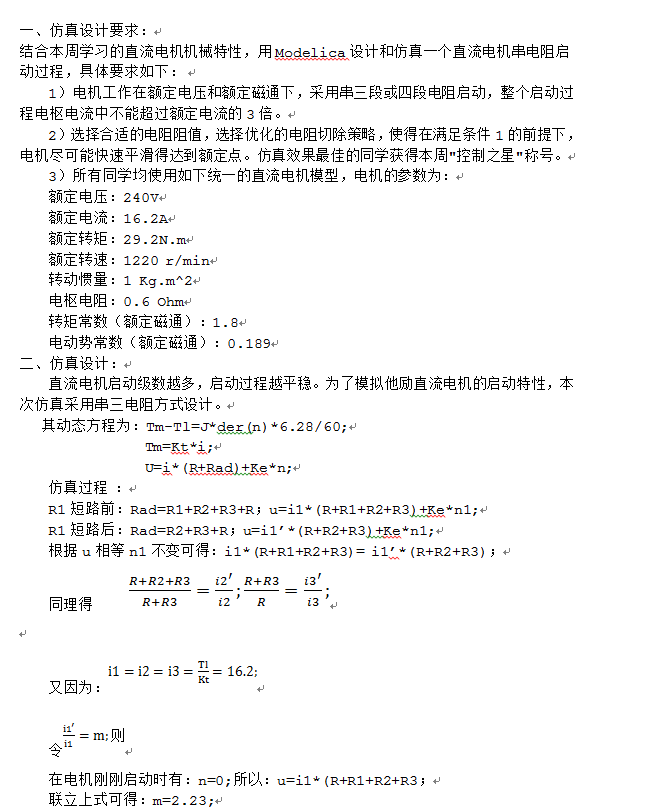
四、仿真结果: