继续分析数据的获取过程:
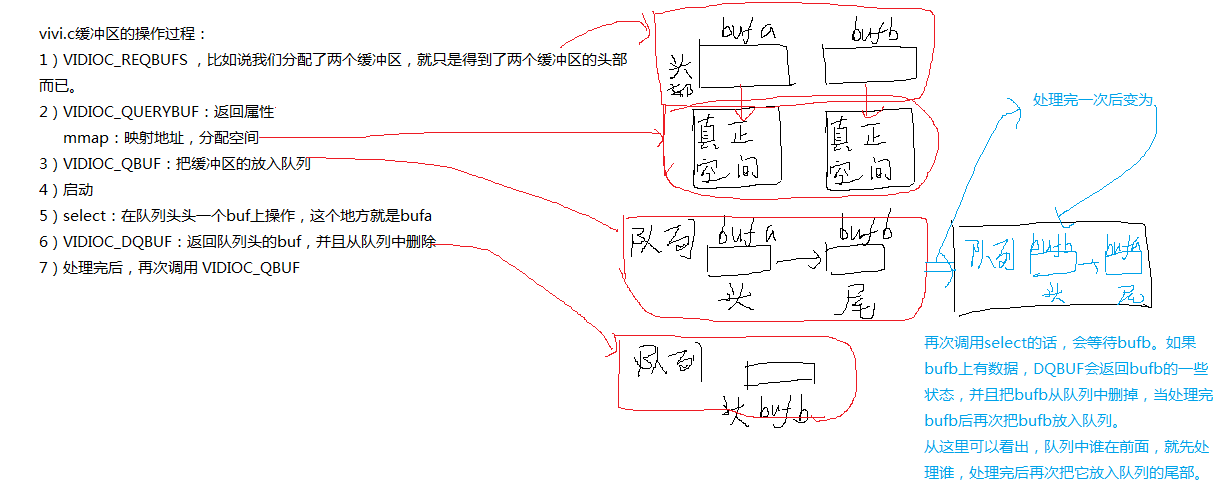
1、请求分配的缓冲区: ioctl(4,VIDIOC_REQBUFS)
vidioc_reqbufs
2、查询和映射缓冲区
ioctl(4,VIDIOC_QUERYBUF)
mmap
3、把缓冲区放入队列
ioctl(4,VIDIOC_QBUF)
4、启动摄像头
ioctl(4,VIDIOC_STREAMON
5、用select函数查询是否有数据
//驱动程序中必定有:产生数据、唤醒进程
6、有数据后,从队列中取出缓冲区
ioctl(4,VIDIOC_DQBUF
------------------------------------------------------------------------------------------------------------------------
app: VIDIOC_REQBUFS
vidioc_reqbufs
vb2_reqbufs(&dev->vb_vidq, p)//第一个参数表示队列
注意:这个ioctl只是分配缓冲区的头部信息,真正的缓存还没有被分配,在驱动程序里有一条原则,这些资源只有在用的时候才分配。
队列是在哪个地方进行初始化的?
/*此函数主要是返回dev->p->driver_data指针,
device结构体其实是对内核中所有设备的抽象表示,所有的设备都有一个device实例与之对应
device结构体的主要用法是将其嵌入到其他的结构体中,如platform_device*/
void *dev_get_drvdata(const struct device *dev)
{
if (dev && dev->p)
return dev->p->driver_data;
return NULL;
}
static inline void *video_get_drvdata(struct video_device *vdev)
{
return dev_get_drvdata(&vdev->dev);
}
struct video_device *video_devdata(struct file *file)
{
return video_device[iminor(file->f_path.dentry->d_inode)];//根据次设备号从video_device[]数组中取出device设备
}
static inline void *video_drvdata(struct file *file)
{
return video_get_drvdata(video_devdata(file));
}
static int vidioc_reqbufs(struct file *file, void *priv, struct v4l2_requestbuffers *p)
{
struct vivi_dev *dev = video_drvdata(file);//根据次设备号得到dev这个结构体
return vb2_reqbufs(&dev->vb_vidq, p);//把p这个缓冲区放入dev结构体中的vb_vidq队列中
}
-------------------------------------------------------------------------------------------------------------------
app: VIDIOC_QUERYBUF//查询所分配的缓冲区
vidioc_querybuf
注意,这里只是表示缓冲区将会有多大,并不表示这个缓冲区的内存被分配
static int vidioc_querybuf(struct file *file, void *priv, struct v4l2_buffer *p)
{
struct vivi_dev *dev = video_drvdata(file);
return vb2_querybuf(&dev->vb_vidq, p);/*获得缓冲区数据格式、大小、每一行长度、高度等*/
}
mmap //在这里才分配缓存。注意在分析mmap函数时,所用的内核不是3.4.2.是根据韦老大讲解的整理的
v4l2_mmap
vivi_mmap
videobuf_mmap_mapper
_videobuf_mmap_mapper //该函数在videobuf_vmalloc.c里面
-----------------------------------------------------------------------------------------------------------
app: VIDIOC_QBUF //把缓冲区放入队列(也是根据韦老大讲解的进行整理,内核不是3.4.2)
vidioc_qbuf
videobuf_qbuf
q->ops->buf_prepare(q,buf,field)//调用驱动程序里面提供的函数做一些预处理工作
list_add_tail//把缓冲区放入队列的尾部
q->ops->buf_queue(q,buf)调用驱动程序里面提供的入队列函数
----------------------------------------------------------------------------------------------------------------
app : VIDIOC_STREAMON //启动
----------------------------------------------------------------------------------------------------------------
用select查询是否有数据(根据韦老大讲解的进行整理,内核不是3.4.2)
在驱动程序里面对应的是poll机制。
V4l2_poll
vdev->fops->poll(vivi_poll)
vivi_poll
videobuf_poll_stream
buf=list_entry(q->stream.next, struct videobuf_buffer,stream)//从队列的头部获得缓冲区
如果缓冲区里面没有数据的话,就调用poll_wait等待
poll_wait(file,&buf->done,wait)//在这里休眠
谁来产生数据,谁来唤醒它(在vivi.c中搜索done)
vivi_thread_tick
wake_up(&buf->vb.done)
唤醒进程:谁来调用vivi_thread_tick这个函数呢?
因为这里是一个虚拟的摄像头驱动程序,它会怎样产生数据呢?
如果是一个真实的摄像头的话,是硬件来产生数据的。但是在虚拟摄像头驱动里面,是用内核线程来产生数据的。
timeout = msecs_to_jiffies();
创建一个内核线程,每隔30ms就会执行一次,每次就会调用vivi_thread_tick(fh)来产生数据。在vivi_thread_tick()中会
调通过vivi_fillbuf(fh,buf)来构造数据。调完之后,又开始休眠schedule_timeout_interruptible(timeout)
---------------------------------------------------------------------------------
/*有数据后,从队列中取出缓冲区。有那么多缓冲区,app如何知道哪一个缓冲区有数据,
调用VIDIOC_DQBUF(根据韦老大讲解的进行整理,内核不是3.4.2)
app : VIDIOC_DQBUF
vidioc_dqbuf
/*在队列中获得有数据的缓冲区*/
retval = stream_next_buffer(q,&buf,nonblocking);
/*把它从队列中删掉*/
list_del(&buf->stream)
/*把缓冲区的状态返回给应用程序*/
videobuf_status(q,b,buf,q->type);
-------------------------------------------------------------------------------------------
应用程序根据VIDIOC_DQBUF所得到缓冲区的状态,知道哪一个缓冲区有数据,就去读对应的地址(该地址来自前面的mmap)
------------------------------------------------------------------------------------------