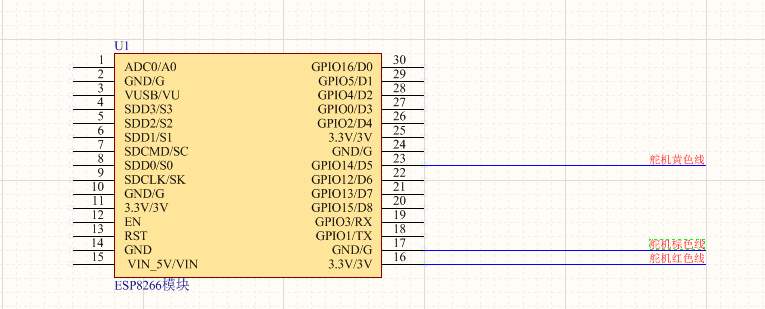
使用时发现会有ESP8266掉电的情况,应该是板上的稳压芯片的限流导致的,观测波形,发现当舵机运转时,电源线3.3V不再是稳定的3.3V,大概是在3.0V到3.3V范围内高频振动,这应该是ESP8266掉电的原因,可以将舵机电源连接到另一个电源上。当舵机使用外部电源的时候,一定要将舵机的电源地和ESP8266的地要连接在一起,这样,才可以正常工作。
这次使用了Servo.h的头文件,头文件内容如下:
/*
Servo.h - Interrupt driven Servo library for Esp8266 using timers
Original Copyright (c) 2015 Michael C. Miller. All right reserved.
This library is free software; you can redistribute it and/or
modify it under the terms of the GNU Lesser General Public
License as published by the Free Software Foundation; either
version 2.1 of the License, or (at your option) any later version.
This library is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public
License along with this library; if not, write to the Free Software
Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA
*/
// A servo is activated by creating an instance of the Servo class passing
// the desired pin to the attach() method.
// The servos are pulsed in the background using the value most recently
// written using the write() method.
//
// The methods are:
//
// Servo - Class for manipulating servo motors connected to Arduino pins.
//
// attach(pin ) - Attaches a servo motor to an i/o pin.
// attach(pin, min, max ) - Attaches to a pin setting min and max values in microseconds
// default min is 544, max is 2400
//
// write() - 设置舵机的角度 (invalid angle that is valid as pulse in microseconds is treated as microseconds)
// writeMicroseconds() - 设置舵机的脉宽为微秒级的
// read() -读取最近一次舵机的脉宽并且转换成0-180度
// readMicroseconds() -读取最近一次微秒级的脉宽(was read_us() in first release)
// attached() - 如果有一个舵机引脚被设置了则返回真.
// detach() - 停止使用这个舵机引脚.
#ifndef Servo_h
#define Servo_h
#include <Arduino.h>
// the following are in us (microseconds)
//
#define MIN_PULSE_WIDTH 544 // the shortest pulse sent to a servo
#define MAX_PULSE_WIDTH 2400 // the longest pulse sent to a servo
#define DEFAULT_PULSE_WIDTH 1500 // default pulse width when servo is attached
#define REFRESH_INTERVAL 20000 // minumim time to refresh servos in microseconds
#if !defined(ESP8266)
#error "This library only supports esp8266 boards."
#endif
class Servo
{
public:
Servo();
~Servo();
uint8_t attach(int pin); // attach the given pin to the next free channel, sets pinMode, returns channel number or 0 if failure
uint8_t attach(int pin, uint16_t min, uint16_t max); // as above but also sets min and max values for writes.
void detach();
void write(int value); // if value is < 200 its treated as an angle, otherwise as pulse width in microseconds
void writeMicroseconds(int value); // Write pulse width in microseconds
int read(); // returns current pulse width as an angle between 0 and 180 degrees
int readMicroseconds(); // returns current pulse width in microseconds for this servo (was read_us() in first release)
bool attached(); // return true if this servo is attached, otherwise false
private:
bool _attached;
uint8_t _pin;
uint16_t _minUs;
uint16_t _maxUs;
uint16_t _valueUs;
};
#endif
代码部分:
#include<Servo.h>
Servo myservo;//应该和c语言的结构体类似
int _servo=15;
void setup()
{
myservo.attach(_servo);//设置舵机的引脚
myservo.write(0);//默认输出为0度
}
void loop()
{
for(int i=0;i<180;i++)
{
myservo.write(i);//舵机转线i度的地方
delay(500);
}
for(int i=180;i>0;i--)
{
myservo.write(i);
delay(50);
}
}